高通专利提出增强的LiDAR捕获方法

训练基于激光雷达的对象检测机器学习模型,并使用基于LiDAR的对象表示来增强现有LiDAR捕获
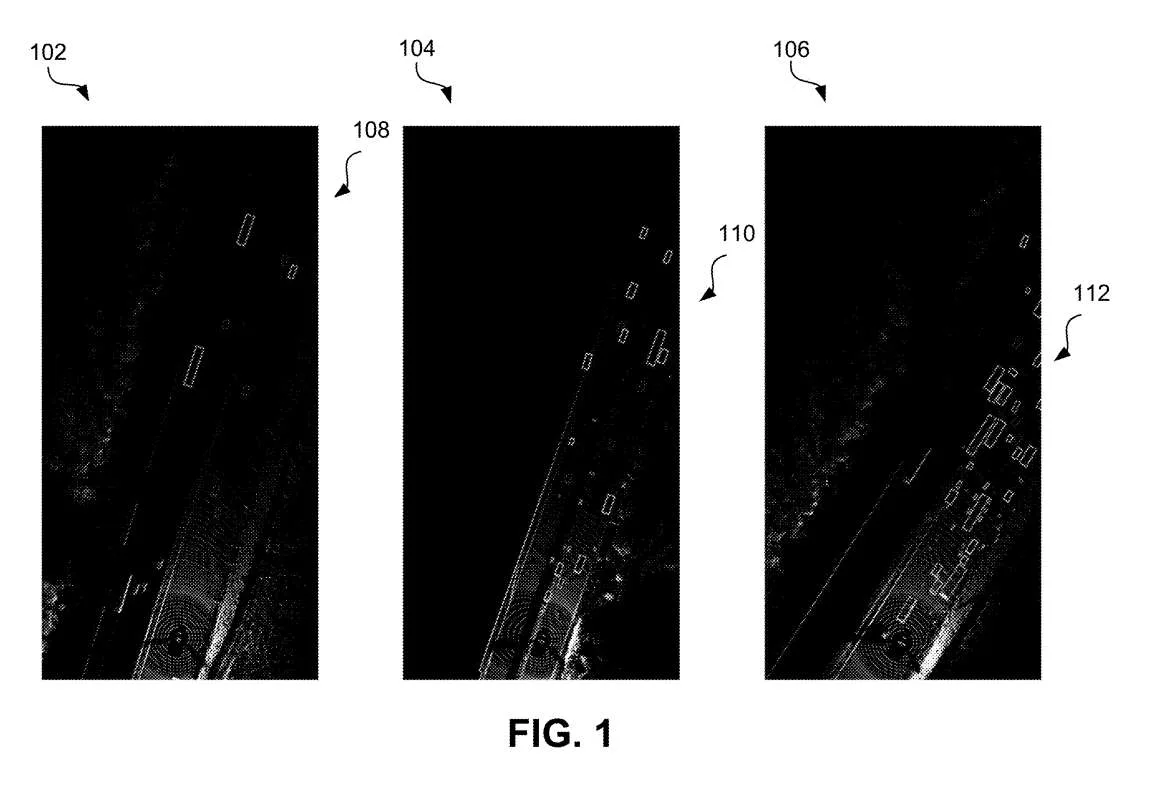
(映维网Nweon 2024年11月29日)LiDAR激光雷达系统使用一个或多个激光器扫描环境,并根据对象反射的激光来计算LiDAR系统与环境中对象之间的距离。这种技术可应用于自动驾驶汽车和AR/VR等广泛领域。
在一份专利申请中,高通就提出了一种增强的LiDAR捕获方法。具体来说,发明介绍的方法使用训练过的对象检测机器学习模型进行对象检测的自适应区域对象采样。
发明描述的系统可用于训练基于激光雷达的对象检测机器学习模型,并使用基于LiDAR的对象表示来增强现有LiDAR捕获,从而允许生成密集距离LiDAR捕获。发明可以使用密集的远距离激光雷达捕获来训练对象检测机器学习模型,从而训练对象检测机器学习模型来检测远方对象。
......(全文 3445 字,剩余 3136 字)











