优化HoloLens快速定位,微软专利提出基于GPS+传感器的重定位系统

基于GPS和传感器的重定位系统
(映维网Nweon 2022年03月28日)MR头显需要相对于物理环境的位置和/或物理环境的几何形状来呈现虚拟内容。所以,MR系统必须保持位置和方向的精确感知,从而能够根据用户的视角变化来显示自然的数字内容。
为了做到这一点,一系列的MR系统都依赖于SLAM技术。这通常要求用户在整个物理环境中移动,以允许MR系统捕获足够数量的物理环境关键帧,从而构建物理环境的映射。然而,初始映射构建非常耗时,并且极大地限制了MR系统提供多样化体验的多功能性。
为了避免初始映射构建过程,MR系统可以至少部分地利用先前构建的物理环境映射来初始化MR体验。然而,为了使用先前构建的物理环境映射来初始化MR体验,MR系统通常必须知晓MR系统相对于物理环境的位置。换言之,MR系统必须在物理环境中进行自定位/重定位。
另外,MR系统在关键帧之间进行搜索会耗费大量计算和时间,尤其是对于包含大量关键帧的大型现实世界空间映射。
针对上述问题,微软提出了一种旨在促进快速定位的优化技术和系统。在名为“Systems and methods for gps-based and sensor-based relocalization”的专利申请中,团队介绍了一种基于GPS和传感器的重定位系统。
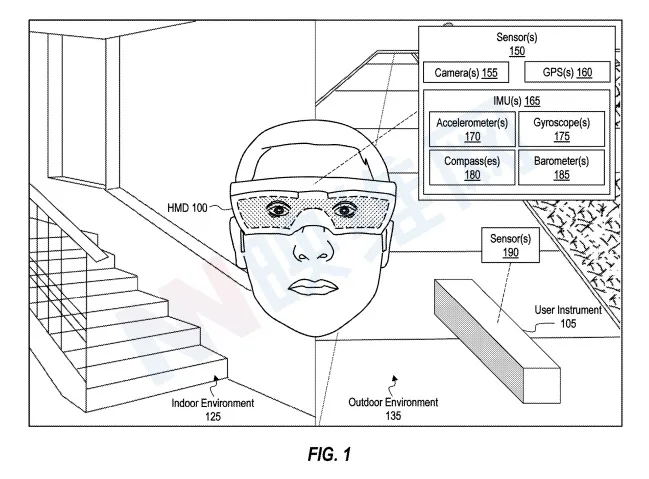
图1示出了头戴式设备100的示例。头显100包括传感器150,而传感器150包括摄像头155、GPS 160和惯性测量单元(IMU)165。IMU 165可包括各种惯性追踪组件,例如加速计170、陀螺仪175、指南针180(例如一个或多个磁强计)和/或气压计185。
......(全文 4025 字,剩余 3511 字)