斯坦福、英伟达和MIT团队提出显著改善全息图像质量的解决方案

显著改善了图像质量和光通量
(映维网Nweon 2024年12月03日)新兴的全息显示技术为下一代虚拟现实和增强现实系统提供了独特的功能。然而,目前的全息近眼显示器只支持一个小可变空间,从而导致了在视场和视窗尺寸之间的直接权衡。
尽管行业已经在探索Étendue Expansion光学扩展量扩展,但现有的方法要么在可实现图像质量方面受到根本限制,要么需要极高速的空间光调制器。
日前,斯坦福大学,英伟达和麻省理工学院的团队描述了一种显著改善了图像质量和光通量的全新扩展方法,并计划在2024月12月举行的SIGGRAPH ASIA大会进行介绍。
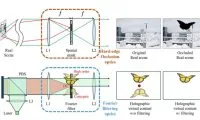
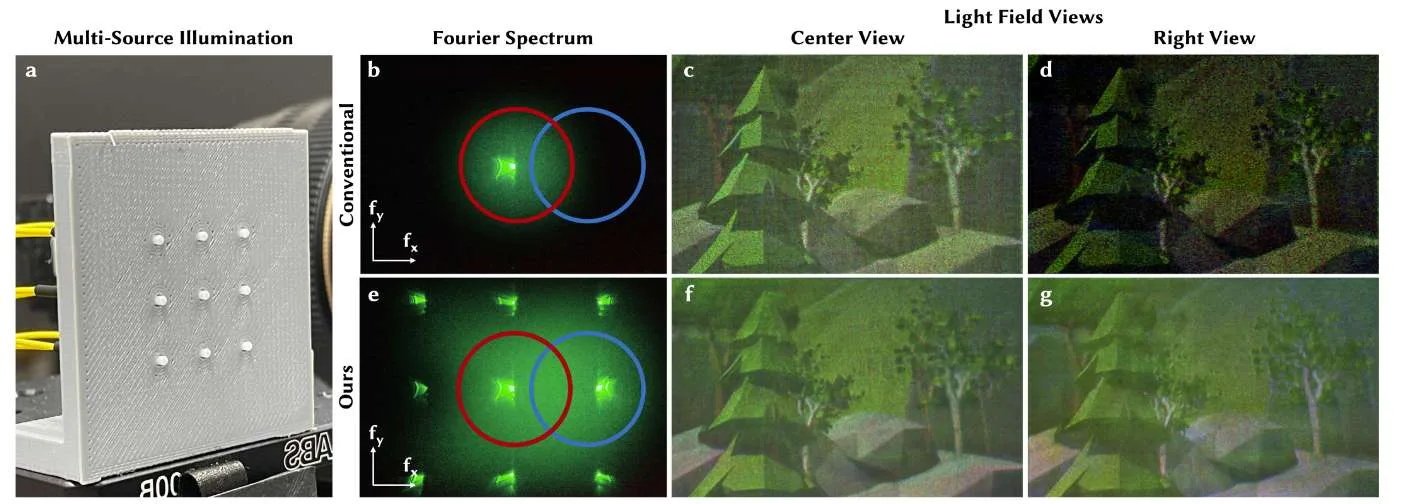
概括而言,所述该方法将多个相干源与傅里叶平面全息图频谱的内容自适应幅度调制相结合。为了给间光调制器生成时间复用相位和振幅模式,团队设计了一种基于瞳感梯度下降的计算机生成全息算法,并由大基线目标光场监督。
与相关的基线方法相比,所述方法在模拟和实验全息显示原型中显示了显著改善的图像质量和光通量。
全息近眼显示器为虚拟现实和增强现实应用提供了独特的优势。例如,全息显示器可以以轻量级设备形式向用户呈现具有自然视差的感知逼真3D图像。
......(全文 1484 字,剩余 1057 字)