微软专利进一步介绍了HoloLens上的传感器摄像头

用于增强现实头显的摄像头
(映维网 2021年12月21日)摄像头已经成为了AR/VR头显的重要组成组件。在名为“Camera for augmented reality display”的专利申请中,微软就介绍了用于增强现实头显的摄像头。
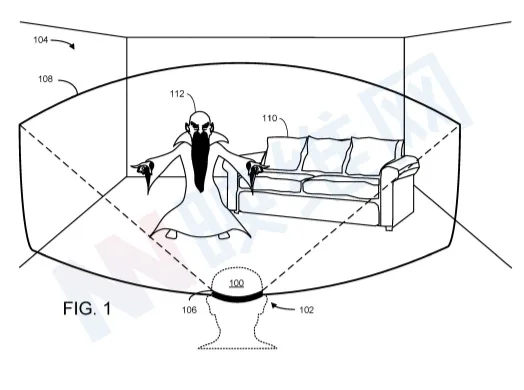
图1示意性地描绘了一个增强现实场景。具体地,图1示意性地示出了在真实环境104中使用增强现实显示设备102的用户100。增强现实显示设备102通过近眼显示器106向用户的眼睛呈现图像,从而提供增强现实体验。由近眼显示器呈现的图像包括描述由摄像头捕获的真实世界图像,以及由增强现实显示设备生成或使用增强现实显示设备查看的虚拟图像的混合。
在图1的示例中,用户可以看到由增强现实显示设备摄像头成像的真实沙发110,以及由增强现实显示设备生成并作为增强现实体验一部分呈现在近眼显示器的虚拟角色112。
或者,虚拟图像可以由不同于增强现实显示设备的设备生成。例如,增强现实显示设备可以从单独的渲染计算机接收预渲染虚拟图像,并通过近眼显示器显示预渲染虚拟图像。渲染计算机可以是增强现实显示设备的本地计算机(例如通过有线连接或合适的无线协议进行通信),或者渲染计算机可以远离增强现实显示设备(例如服务器计算机),并通过互联网或其他合适的网络进行通信。
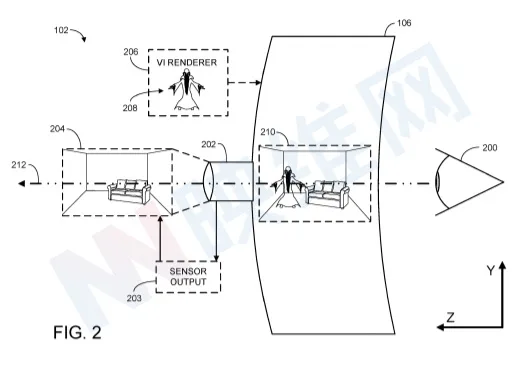
图2更详细地描述了真实图像和虚拟图像的混合。具体地,图2示意性地示出了增强现实显示设备102在使用期间的各个方面。近眼显示器106位于用户100的用户眼睛200附近,使得近眼显示器呈现的图像对用户可见。增强现实显示设备102配备有摄像头202。摄像头202配置为捕捉来自真实世界环境的光,并生成可用于有助于经由近眼显示器呈现给用户眼睛的图像的输出。
具体地,如图所示,摄像头202基于传感器输出信号203捕捉图1中的真实世界环境104的图像204。值得注意的是,图像204可以是静止图像,或者可以是具有任何适当帧速率的视频流的一帧,例如每秒90帧。
......(全文 3982 字,剩余 3312 字)