苹果专利提出检测光学元件位置变化的光学自混合传感器,实现IPD调整

用于检测光学元件位置变化的光学自混合传感器
(映维网 2021年10月18日)AR/VR头显包含一系列的光学元件。但在使用过程中,头显中的光学元件可能会发生移位,需要通过致动器进行相应的补偿,又或者说头显需要光学元件自动移位以实现特定的目的,比如说调整IPD。但在致动器移动光学元件以完成补偿之前,你首先需要确定光学元件的位置变化。
在名为“Head-mounted electronic device with self-mixing sensors”的专利申请中,苹果就介绍了用于检测光学元件位置变化的光学自混合传感器。
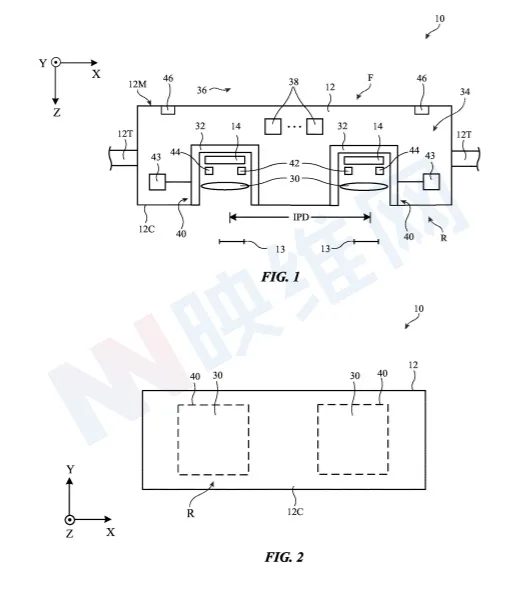
图1是说明性头戴式设备的俯视图。可以看到,设备包含一系列的光学元件,如外向摄像头46,内向摄像头42,透镜30,显示器14,以及发光二极管44等等。
在一个实施例中,由于并非所有用户的瞳孔间距IPD都相同,所以头显可以纳入支持IPD调整的功能,亦即允许调整透镜的机制。
为了允许头显10能够沿横向尺寸X调整包含透镜、显示器、发光二极管和内向摄像头的光学模块40之间的瞳孔间距,以适应不同的用户瞳孔间距,头显10可在壳体12中配备光学模块定位系统。其中,定位系统可具有用于相对于彼此定位光学模块40的引导构件和致动器43。
......(全文 793 字,剩余 383 字)











