苹果专利进一步提升了3D深度扫描引擎的技术能力

查看引用/信息源请点击:patentlyapple
利用彩色图像数据来校准深度传感阵列
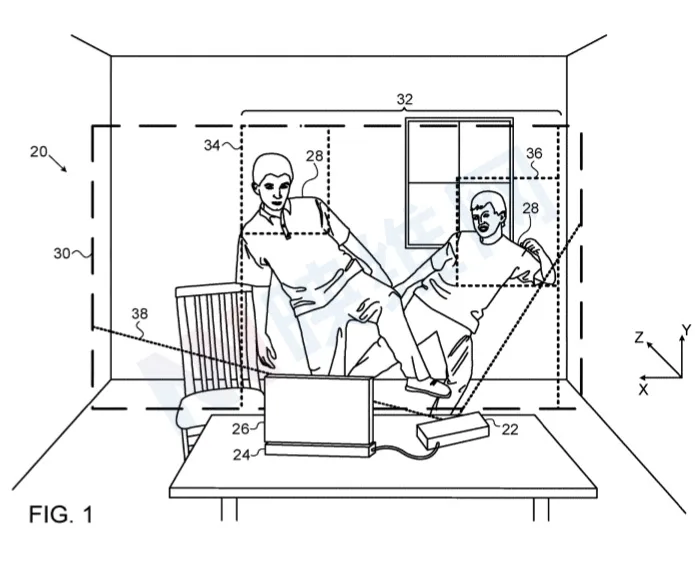
(映维网 2021年07月09日)日前美国专利商标局公布了苹果于2019年提交的一份深度扫描引擎相关发明申请。苹果的专利涉及投影和捕获光辐射的方法和设备,特别是光学3D映射。所述映射设备包括发射器和扫描器,发射器配置成发射包括光脉冲的光束,扫描器配置成在预定的扫描范围内在场景扫描光束。
名为“Calibration of a depth sensing array using color image data(利用彩色图像数据校准深度传感阵列)”源于苹果在以色列的工程师,主要是苹果收购的PrimeSense。值得一提的是,这家公司的技术帮助发明了面容ID系统。
苹果的发明涉及改进的深度映射系统和方法,特别是用于飞行时间传感的传感器阵列。
现有的和新兴的消费者用例对实时三维成像仪的需求越来越大。这种成像组件同时称为深度传感器或深度映射器。通过用光束照亮目标场景并分析反射光信号,它们可以远程测量到目标场景中每个点的距离(通常是强度),亦即目标场景深度。特定系统同时会捕获目标场景的彩色图像,并用彩色图像对准深度映射。
要确定到目标场景每个点的距离,常用技术包括向目标场景发射一个或多个脉冲光束,然后测量往返时间(即飞行时间ToF)。
......(全文 892 字,剩余 456 字)











