Magic Leap新专利采用雷达系统进行头显定位

利用雷达系统来帮助确定头显方位,以允许渲染对象相对于真实世界保持与静止的位置
(映维网 2021年05月18日)即便用户移动头部,增强现实设备都能够允许渲染对象相对于真实世界保持于静止的位置。例如,如果用户将向右旋转头部,则渲染对象必须与真实世界对象一起在用户视图中向左旋转。对于这一点,系统需要确定头显方位,亦即需要确定穿戴头显的头部的定位。增强现实设备的运动可以通过诸如惯性测量单元(IMU)等测量组件进行追踪,以便系统调整渲染对象的位置。
美国专利商标局日前公布了Magic Leap一份于2019年5月提交的专利申请。具体来说,名为”Radar head pose localization“主要描述了一种利用雷达确定头部定位的技术。
在一个实施例中,专利描述的头戴式设备包括框架、雷达系统、测量单元、测量单元滤波器、传感器融合模块、渲染模块、目镜和投影仪。
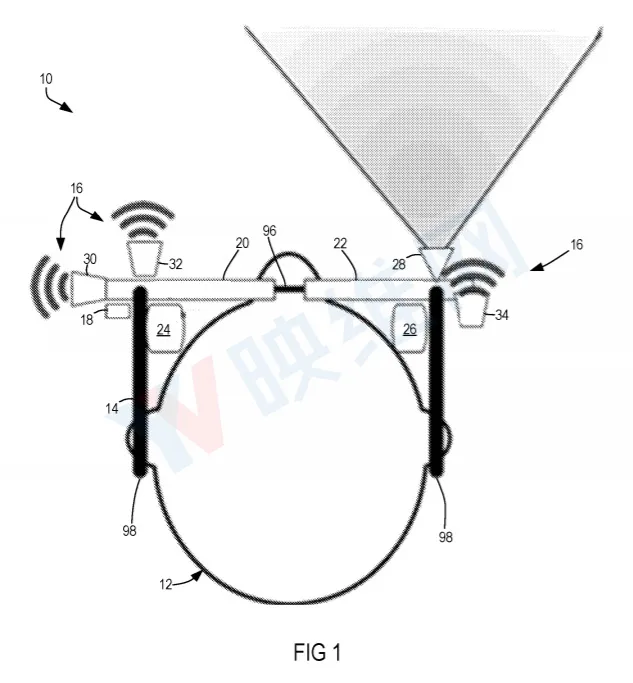
如图一所示,增强现实设备是#10和用户头部为#12。增强现实设备#10可以包括框架#14、雷达系统#16、测量单元#18、第一目镜#20和第二目镜#22、第一投影仪#24和第二投影仪#26,以及前置摄像头#28。
其中,雷达系统至少包括第一雷达组件。第一雷达组件具有固定在框架,并且于第一时间和第二时间在快域发射无线电波时的第一雷达发射器,以及固定框架并在无线电波从表面反射后检测无线电波的第一雷达接收器。
雷达系统同时包括雷达追踪模块。雷达追踪模块接到第一雷达接收器,其分别在无线电波的发射和检测之间,于快域确定第一时间间隔和第二时间间隔。
......(全文 1278 字,剩余 742 字)