微软新HoloLens专利介绍如何“实时”识别真实环境对象、确定对象位置

实时或基本实时地识别对象的各种表面
(映维网 2021年01月13日)对于需要将数字信息逼真地叠加到现实世界的增强现实设备而言,精确识别真实世界表面和对象的能力非常重要。HoloLens背后的研发厂商微软认为,尽管当前的增强现实设备可以能够识别真实世界环境中的大型表面(如地板、天花板、墙壁和桌面等),但它们不能自动识别现实环境中的对象或对象类型。
在日前由美国专利商标局公布的一份专利申请中,微软介绍了如何识别真实世界环境中的对象、确定对象所在的位置,并且实时或基本实时地识别对象的各种表面的技术。
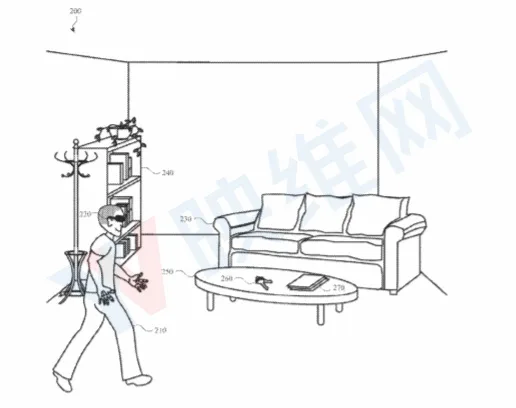
对于“Real time object surface identification for augmented reality environments”这份发明所描述的方法,其主要用于自动识别真实世界环境中的对象,确定对象在与真实世界环境相关联的深度映射中的位置,并实时或基本实时地识别对象的各种表面。
所述方法包括接收真实世界环境的多个图像并分析多个图像,以识别包含在多个图像中的对象。包含在多个图像中的对象对应于真实世界环境中的真实世界对象。所述方法同时包括,分析多个图像以确定对象的一个或多个部分在图像中的位置,并将所述一个或多个部分的确定位置投影到与真实世界环境相关联的深度映射中的相应位置。接下来,根据相应的位置识别对象。
在一个实施例中,所述方法包括从真实世界环境中的多个不同位置捕获真实世界环境的多个图像,并识别包含在多个图像中的对象。确定对象在一个或多个图像中的位置。一旦确定了位置,确定对象在一个或多个图像中的一个或多个边缘,并将一个或多个边缘投影到增强深度映射中的相应位置,以为增强现实环境识别对象的表面。
在一个实施例中,所述方法包括在真实世界环境中的不同位置捕获多个图像,并分析所述多个图像以识别包含在多个图像中的对象。确定对象至少一部分的二维坐标,并将坐标转换为与增强深度映射相关联的三维坐标。接下来,根据与增强深度映射相关联的三维坐标识别对象。
......(全文 1040 字,剩余 319 字)











