微软演示触觉反馈控制器PIVOT,VR中摘苹果更逼真

查看引用/信息源请点击:映维网
PIVOT属于腕戴设备,是一种包含触觉手柄的便携式组件,可根据需要在手上来回移动
(映维网 2020年10月21日)当你尝试伸手从苹果树上摘下一颗苹果时,你会获得一系列不同的感知体验,如抱握苹果时的硬度,拽拉苹果时的树枝阻力,摘下苹果后手掌承受的苹果重量,以及指尖触碰苹果时的光滑圆润等等。
微软研究院近年来在控制器方面取得了稳步的进展,而团队一直致力于实现一种能够匹配头显逼真视觉的触觉反馈。对于NormalTouch等设备,团队可以在指尖模拟虚拟对象的表面倾斜质感与纹理;CLAW能给你一种用手指抓握对象以探索其顺应性和弹性的感觉;而TORC则带来了接近于现实世界的灵活度水平。利用所述原型,你可以感知虚拟苹果皮,挤压虚拟水果,并且用手把玩移动。但为了在虚拟环境中实现与虚拟苹果的完全交互,我们必须同时考虑对象的空间动态。现在,微软提出了一种全新的控制器Haptic PIVOT,把力的物理性质带到虚拟现实控制器。PIVOT属于腕戴设备,是一种包含触觉手柄的便携式组件,可根据需要在手上来回移动。
如果牛顿需要从一颗从虚拟树上掉下来的虚拟苹果中找到关于运动定律和引力定律的灵感,他将需要一个类似于PIVOT的控制器。通过将PIVOT固定到手腕,团队可以渲染抛接对象的动量和阻力。这一切都受牛顿定律的控制,包括模拟对象到达手部时的速度:机器化的触觉手柄在需要时展开,接近并最终到达手部,从而创造从空手到握着对象的首次接触感觉,并以传统手持控制器所无法做到的方式模拟我们与物理对象的自然交互。由波茨坦大学、微软研究院、斯坦福大学和苏黎世联邦理工学院组成的团队研究了PIVOT的性能和限制,并共同撰写发表了名为《Haptic PIVOT: On-Demand Handhelds in VR》的论文。另外,所述小组将在本周举行的2020 ACM Symposium on User Interface Software and Technology (UIST)大会介绍Haptic PIVOT。
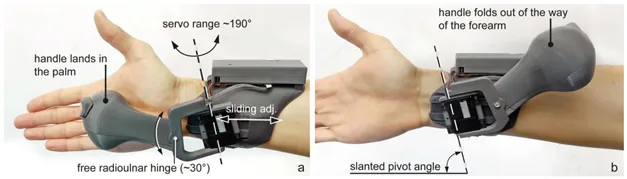
PIVOT能够按需提供关于虚拟对象的控制和触觉渲染。它包括一个通过电动铰链展开(左)和收回(右)的触觉手柄。被动桡尺铰链允许自然的手部倾斜。
1. 从物理到虚拟:按需提供
PIVOT的核心是铰链机制和触觉手柄。触觉手柄属于可换组件,能够置换为现有的控制器。但在PIVOT的研究中,团队为原型手柄配备了一个可以检测对象接触和释放的电容式触控传感器;一个用于提供振动反馈的音圈致动器;以及一个用于控制输入的触发开关。触觉手柄通过一个改进的伺服电机(驱动铰链)工作,并且可以根据需要释放到手掌,不需要时则收起以保持双手自由。这种能力让PIVOT成为增强现实或混合现实场景的理想选择。例如,你可以正常操作键盘,使用鼠标,或者处理其他物理对象。只要需要,你快速摆动手腕即可启动PIVOT,并将手柄旋转释放到手掌,这样你就可以与虚拟对象进行交互。再次摆动手腕,手柄就会收回。两个召唤动作都由一个内部加速度计进行检测。
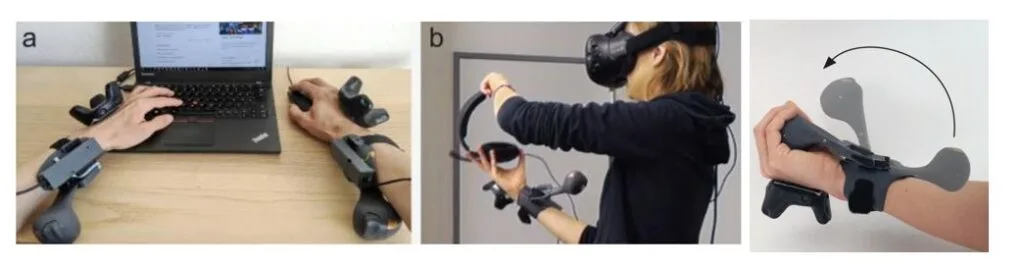
PIVOT可允许用户的双手自由活动,并在需要控制器时提供支持。手腕的快速摆动可以把触觉手柄旋转到手中。这种随需应变的能力在增强现实或混合现实场景中非常有用。
......(全文 2567 字,剩余 1480 字)











