斯坦福大学在Siggraph演示最先进AR/VR全息显示技术

查看引用/信息源请点击:映维网
光场显示和全息显示可能是这里最有趣的研究方向,而我想说的重点是,这些都是非常互补的技术。
(映维网 2020年09月09日)VR/AR显示器的历史就是一种折衷权衡。市场中的大多数产品都属于单平面模型,无论场景中的对象有多远,用户都只能不自然地聚焦于单一的距离。对于Magic Leap等基于波导的多焦点显示器,其价格昂贵,而且视场有限,所以行业对各种替代品越发感兴趣。其中,最富前景的研究领域之一是全息显示,它承诺了一个简单的逼真裸眼结果。
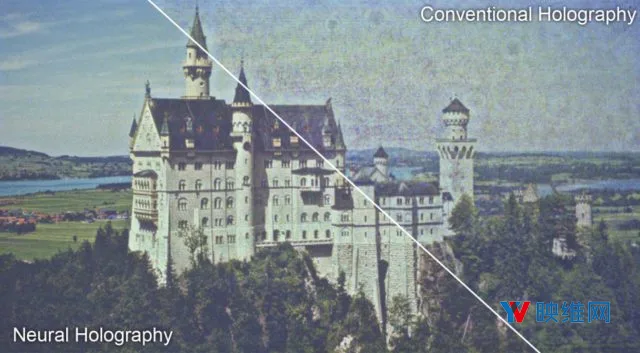
遗憾的是,为全息显示器生成图像是一个复杂而耗时的过程。针对这一问题,斯坦福大学助理教授戈登·韦茨坦(Gordon Wetzstein)日前在SIGGRAPH大会发表了团队的最新研究成果——Neural Holography。除了戈登·韦茨坦之外,研究小组中还有斯坦福大学博士后Yifan Peng,斯坦福大学博士学生Suyeon Choi,斯坦福大学博士毕业生Nitish Padmanaban,以及英伟达高级研究科学家Jonghyun Kim。
相关项目:Neural Holography
“Neural Holography”使用了一个专门的神经网络,并通过所谓的Camera-in-the-Loop模拟器进行训练,从而产生高质量的结果,而且所述系统可以实时运行,目前大约为30帧/秒。
1. 全息显示器的工作原理
对我们中的大多数人而言,我们对全息图的第一次记忆或许是博物馆陈列柜的一幅昏暗单色图像。所以,能够投射出彩色图像是一种非常不可思议的事情。但基本原理没有改变:使用激光光源并进行准直(这样所有的光波都是平行),然后通过一个空间光调制器(SLM)进行传输。其中,调制器在每像素的基础上改变相位。
结果是一个带有干涉图案的光场,并可用于创建场景的三维图像。用户通过一个透镜浏览图像,而系统将在视网膜上产生二维投影。在最简单的应用中,SLM使用固定的变换,但为了优化结果,涉及的变换需要更复杂。例如,斯坦福大学的研究就是单独处理每一个像素。
2. Neural Holography是如何优化全息显示管道
......(全文 5083 字,剩余 4431 字)