微软DreamWalker实现戴VR无障碍上街,带来城市规模重定向行走

实际路径与虚拟路径之间的差异将通过逐步重定向
(映维网 2019年10月22日)在创建全新的沉浸式环境并用以支持用户探索新空间方面,社区近来取得了多个显著的进步。对于微软来说,其研究人员同样在积极地扩展和提升空间计算世界。在本周,他们将在美国新奥尔良举行的2019 ACM用户界面软件与技术研讨会中展示最新的成果。其中一个项目支持人们在现实环境中安全地按照给定路线行走,但同时能够看到不同的虚拟现实世界。

在炎炎夏日的上班途中,你或许希望自己正走在清凉的北国雪地。如果你在走出公寓后就能马上踏进自己一直所畅想的空间呢?在“DreamWalker: Substituting Real-World Walking Experiences with a Virtual Reality”这个项目,斯坦福大学博士生、时任微软研究院实习生Jackie Yang,微软研究员Eyal Ofek,Andy Wilson,以及时任微软研员、现苏黎世联邦理工学院教授Christian Holz共同创建了一个能够实现所述愿望的VR系统。你可以一边行走在物理世界中,一边体验完全不同的VR空间。所述系统能够适配所选的路线,并将沿途的杂货店或公交车站转变为各种虚拟现实建筑物。
前代项目VRoamer能够支持用户在不受控的室内环境中畅玩VR游戏,而DreamWalker向前迈出了全新的一步,将虚拟城市游览与现实世界路径结合在一起,从而解决了非受控室外环境带来的复杂难题。为了完成这一任务,研究人员首先规划用户在虚拟世界中的路径,然后在用户开始行进后实时监测环境,并实现步进重定向和虚拟世界刷新。
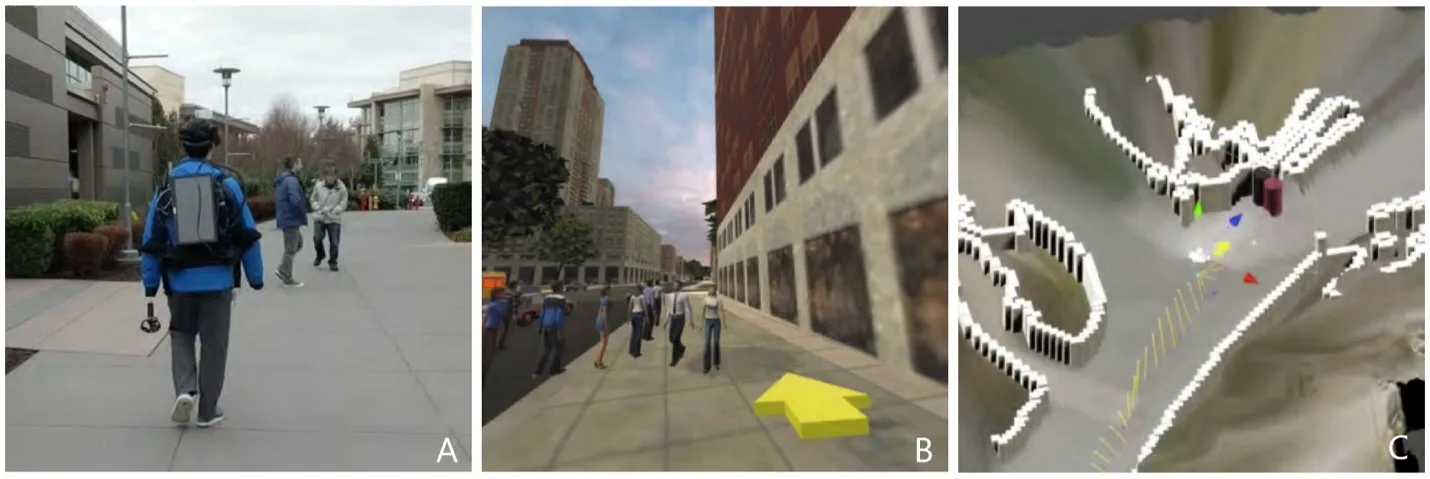
DreamWalker这个VR系统允许用户在现实世界行走(A),但同时在VR中看到完全不一样的画面(B)。这项技术利用路径规划(C)来确定与现实世界路径最匹配的VR路径,并通过修正VR世界来呈现现实世界中的任何已知障碍。在途中发现的障碍物由实时感应技术管理。
在步行开始之前,路径规划会在虚拟世界中寻找一条与实际路径差异最小化的虚拟路径。系统同时将识别虚拟世界中任何需要的潜在改动,从而匹配现实世界中的任何已知对象。实际路径与虚拟路径之间的差异将通过逐步重定向,以及通过修正虚拟场景(如增加虚拟路障)来强制用户校正自己的路径。
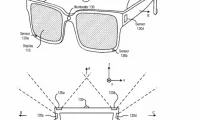
在行走过程中,DreamWalker利用多种传感技术监视用户的环境并监测沿途的障碍物,如Windows Mixed Reality的内向外追踪功能,双波段GPS传感器和两个RGB深度摄像头。
......(全文 1027 字,剩余 209 字)