如何打造真实路面下逼真的VR驾乘体验,诺亦腾、大众进口汽车、Framestore带来了世界首例

文章相关引用及参考:映维网
一段即舒适又刺激,即精确又安全的真实路段下的VR驾乘之旅
(映维网 2018年12月26日)作为一名司机,你可能已经厌倦了经常往返的路途风景,而近些年自动驾驶汽车的发展也将促使司机的角色向乘客转变。为此,诸如英特尔、优步、苹果等已经在大力研发自动驾驶汽车的科技巨头希望结合虚拟现实为你提供丰富多样的路途旅程体验。尽管如此,这些构思目前并没有形成真正的消费产品,而我们也只能从他们的专利中去一窥未来的自动驾乘体验。
左侧实际车辆在上高架台,右侧虚拟车辆在上坡
有幸的是,得益于诺亦腾、大众进口汽车、著名特效工作室Framestore的三方合作,我们还真的尝试了一把VR驾乘体验。虽然诺亦腾、Framestore与大众进口汽车联合演示的汽车大众途锐并非自动驾驶汽车,但实际的驾乘体验却大同小异——即真实汽车在真实的路面上行驶,而驾乘者看到的是可变化多样的虚拟场景。
在8分钟的“大众进口汽车全新一代途锐全体感景域融合式VR驾乘之旅”中,著名特效工作室Framestore制作了其中的VR体验内容——英雄逃脱危险的刺激之旅,而诺亦腾则为该项目提供了全套的定位追踪等技术与现场运营服务。对于这样的结合物理世界与虚拟世界的实际户外真实驾乘体验,在全球还属首例,因此合作三方也在该项目上投入了大量的人力、时间和资源。
那么如何才能打造一段即舒适又刺激,即精确又安全的真实路段下的VR驾乘之旅呢?
◐ 1. 驾驶场地
如果你有玩过赛车类型的游戏,无论是传统游戏还是VR游戏,地图场景中都会有至少一个精心设计的赛道,包括直线路段、弯道路段、上下坡路段、颠簸路段、狭窄路段、山洞路段等。为了真实还原物理世界的主要驾乘路况体验,由Framestore设计的本次VR试驾场景具备了前述真实环境下的所有路段特点。

驶过山洞弯道
如果只是纯虚拟场景,当然可以设计出非常庞大的虚拟驾驶场地,但要融合真实世界的真实驾驶,就意味着需要将真实场景与虚拟场景映射起来,跟可自由行走的大空间VR体验类似。如果采用VR常用的1:1对应比例,那么也需要具备与虚拟驾驶场地同样尺度规模的真实驾驶场地。为了同时保证足够灵活自由的真实驾驶和丰富刺激的虚拟驾乘体验,最终方案是在1万平方米的真实场地上采用1:4的速度比例,即虚拟驾乘的速度会是实际车辆速度的4倍,这也要求真实世界的道路长度是以1:4的比例映射由Framestore设计的虚拟道路。

上:高架台,下:斜架台
为了映射虚拟驾驶场地的道路设计,真实场地通过路锥准确规划出与虚拟道路一样设计的实际驾驶道路。为了配合不同的路况体验,现场搭设了高架台、斜架台、凹凸面等,即在VR场景中经过颠簸路段时实际车辆会驶过凹凸面,在VR场景中经过爬坡路段时实际车辆会驶上高架台,在VR场景中经过下坡路段时实际车辆会驶下高架台,在VR场景中经过斜坡路段时实际车辆会驶过斜架台。当然,转弯的映射通过路锥规划即可实现。
◐ 2. 车辆定位
当完成了虚拟道路和实际道路的映射之后,如何才能保证在行驶过程中,真实车辆所在真实道路的位置跟虚拟车辆所在虚拟道路的位置是正确一致对应呢?这就涉及到该体验中的最大技术挑战——车辆定位。
当然,我们已经在驾车导航中广泛采用了GPS定位技术,但GPS定位的精度是米级别,这显然根本不能保证正确、低延迟的VR体验。比如,实际车辆在已经驶下高架台并接上平面道路时,VR中的你可能还是斜着身体在下坡路段中,哪怕1米的误差已足以造成这样的映射错误现象,并可能造成严重的视觉辐辏调节冲突,带来晕动症。
上坡/上高架台时车辆姿态的实时变化
为了解决定位精度问题,诺亦腾通过双追踪车辆定位系统将车辆的定位精度提高到厘米级。在行驶过程中,车辆的位置由GPS惯性导航模块实时追踪,然后再通过部署在场地中的高精度DGPS户外基站进行实时误差修正。
◐ 3. 虚实交织
虽然做到了虚拟驾乘场地与真实驾乘场地的准确映射,也做到了厘米级的车辆定位,但如何才能实现真实环境数据(包括司机和副驾乘客的行为数据)与VR系统进行快速传输运算呢,从而实现低延迟的体验。这就需要搭配高性能计算机电脑。
当前的汽车几乎都搭配了微型计算机系统,但都不具备媲美PC电脑的高性能计算能力。当然也可以采用无线传输的形式,将车辆上的数据传输到机房里高性能的PC电脑上进行运算渲染,再将结果回传到佩戴VR头显的乘客身上,但显然会导致更高的延迟。

汽车改装
为此,诺亦腾和大众进口汽车选择将配有英伟达GTX 1080显卡的高性能PC电脑安装在大众途锐的尾箱中,并重新改装了车辆的软包(如上图标识的白色区域),将所有线缆包裹入软包之中。现场的每一辆全新一代途锐试驾车辆内,都部署了定制化的集成机柜、惯性导航模块、供电系统、电源控制系统、DGPS数传设备、一体化头显(Oculus Rift的改装)以及追踪摄像头等设备。
追踪驾驶员行为动作
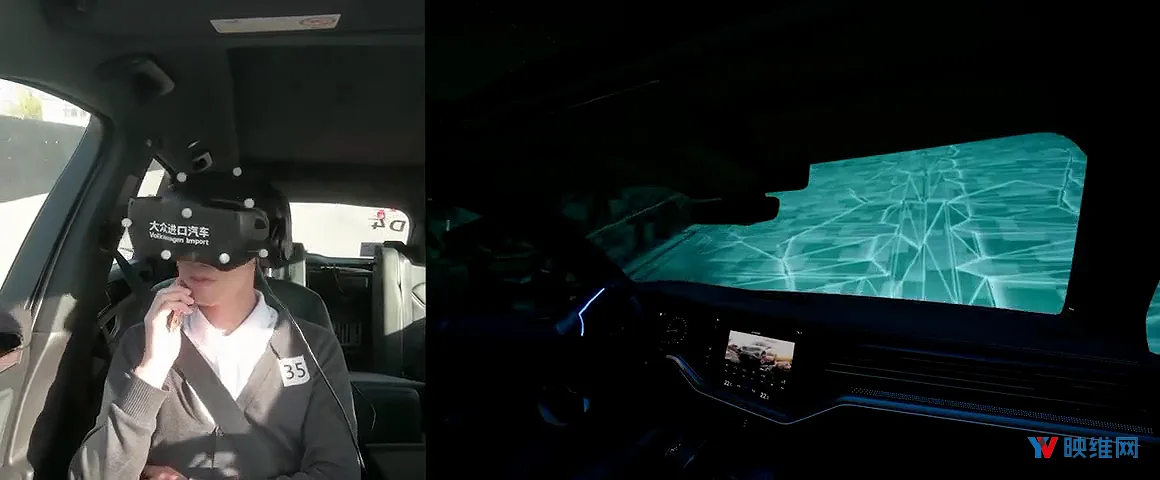
装置在原本后视镜位置的光学摄像头可以精确追踪司机的动作,位于副驾正前方的专门为大众进口汽车定制的特殊版本Project Alice可以精确追踪活动体验者的动作。通过数传设备,车辆位置数据、司机动作数据与佩戴VR头显的体验者信息数据,都会传输至尾箱的高性能PC电脑上进行运算渲染,以确保车辆运动、司机运动以及体验者的运动能保持一致的低延迟的感知交互体验。
◐ 4. 结语
“大众进口汽车全新一代途锐全体感景域融合式VR驾乘之旅”旨在凸显全新一代途锐的强劲性能,融合了诺亦腾的前沿软硬件技术、Framestore的精彩VR内容以及全新一代进口途锐汽车的卓越驾乘体验,从真正意义上实现了“在户外动态环境中进行的一次超现实VR试乘体验”。
这段8分钟的VR驾乘体验给我留下了深刻的印象,尤其是经过弯道和颠簸路段时,我不得不惊叹体验的精确和逼真性,这也让我更加期待自动驾驶汽车VR驾乘体验将带来的汽车产业变革。










