浅谈空间定位系统的内向外追踪和外向内追踪

文章相关引用及参考:映维网
本文来自PTC的Varun Mani
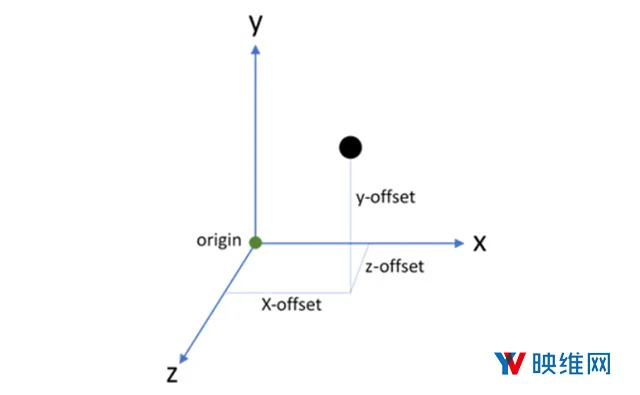
(映维网 2018年08月06日)从本质上讲,一个空间定位系统需要提供两个要素:第一,对原点的普遍共识;第二,三个空间维度上与原点的偏移(如下图所示)。在GPS中,共同原点是地球本身,偏移则描述为纬度,经度和高度。相比之下,室内空间定位系统可以拥有相对于物体定位的任意原点。例如,某些商场使用蓝牙信标来追踪访客。在这种情况下,每个信标将充当原点,并且可以追踪个人移动电话的位置。尽管单个信标追踪已经有用,但我们可以组合来自多个信标的信号,以及一个普遍认可的原点来创建更复杂的室内定位系统。我们可以使用WiFi,红外线,甚至是搭载计算机视觉算法的摄像头来代替蓝牙信标,然后在空间中追踪对象。
◐ 1. 追踪方法
目前存在两种在3D空间中追踪对象的方法:内向外追踪和外向内追踪。
对于采用某种信标的任何方法都属于外向内追踪。对于这种方法,你需要在环境中置放一定的对象(信标,追踪塔或摄像头),然后向需要追踪的对象发送信号或接受信号。根据信号,追踪对象和信标,各种算法(信号强度,信号之间的时间,对象大小等)接下来将对对象的位置进行三角测量。目前市场上的大多数VR系统都采用不同形式外向内跟踪。例如,HTC Vive使用外部追踪塔和红外发射器来精确追踪头显的位置;Oculus Rift和PSVR同样利用外置摄像头来追踪头显的位置。
内向外追踪不需要外部传感器或信标。相反,被追踪对象将搭载一个或多个摄像头,以及一个惯性测量单元(磁力计,陀螺仪和加速度计)。然后系统将利用3D即时定位与地图构建(SLAM)算法等复杂的计算机视觉算法来获取对象的精确位置。内向外追踪试图模仿人类记忆位置的能力,并单单依靠自己的“眼睛”和“内耳”在空间中导航。
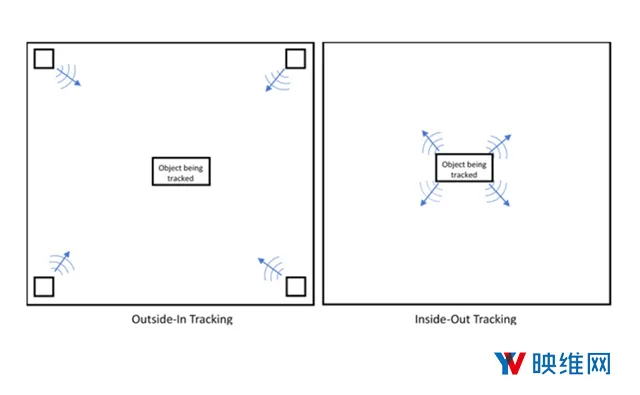
尽管内向外追踪不像外向内追踪那样需要外部传感器,但缺少外部传感器则意味着没有明显的共同原点可供选择。在外向内追踪系统中,外部传感器不会(也不能)移动,因为底层算法假设外部信标属于静止状态。外向内追踪的这一固有属性意味着原点通常位于所有信标的中心,从而提供最精确的结果。对于内向外追踪,由于不存在原点概念,所以对象的初始位置在追踪开始后将作为原点。图2是外向内追踪和内向外追踪的示意图。
◐ 2. 室内追踪与室外追踪
自全球定位系统(GPS)诞生以来,我们一直在利用空间数据。GPS是外向内追踪的一个例子,其中地球静止卫星(静态“信标”)产生无线电信号,然后相对于地球的位置(共同原点)追踪单个对象。
◐ 3. 室外GPS追踪
获取对象在3D空间中的确切位置有助于我们每天的导航,帮助卡车车队将位置报告回总部,甚至帮助导弹发射。GPS同时允许航空公司和航运公司优化路线,确定其资产的确切位置。优步等移动出行平台则利用GPS的空间数据来鼓励驾驶员转向需求较高的地区。通过GPS位置来定位消费者,我们手机上的位置感知应用程序已经开启了全新的消费与零售场景。
遗憾的是,一旦进入室内,这种精确且无处不在的追踪技术就变得毫无用处。由于GPS需要从卫星接收的信号,所以设备需要降级至不太精确的空间追踪机制,如蓝牙或WiFi。
◐ 4. 用于增强现实和虚拟现实的室内追踪
幸运的是,随着增强现实和虚拟现实的出现,室内追踪变得更加普遍,价格范围更加亲民,安装也更加简单。AR和VR设备需要非常精确地追踪用户的位置和方向。欺骗用户并令其认为虚拟对象属于静止状态的唯一方法是,根据用户视角和移动来完美地定向虚拟对象。换句话说,如果用户向左移动一英尺,设备必须要检测到这一点,然后将显示屏中的所有内容向右移动一英尺,从而令画面保持静止。设备越能快速和准确地做到这一点,这种幻觉就越有效。
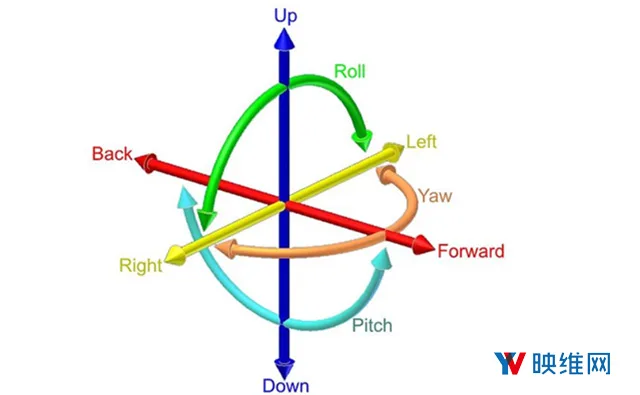
早期的VR设备无法追踪用户在3D空间中的位置。对于简单的惯性测量单元,这种设备只能确定用户的方向(纵摇、横摇和垂摇)。这可以实现一种静态VR体验,其中用户能够上下左右地浏览环境,但无法在空间中移动。要完全捕捉对象在三维空间中的旋转和位置,我们需要捕捉所有六个自由度。最近的VR和AR设备已经能够通过外向内追踪来实现这一目的,但需要在环境中预先安装静态信标,追踪塔或摄像头。至于现在,随着更先进的AR和VR设备,以及更精确的传感器和内向外追踪算法的出现,我们终于能够在不需要事先安装追踪组件的情况下,以前所未有的精度来捕获所有六个自由度。










