Facebook展示如何在AR/VR场景中重建玻璃、镜面场景,将镜子带到虚拟世界

文章相关引用及参考:映维网
将镜子重建为场景中的标准元素不仅是一个愿望,同时是一个要求。
(映维网 2018年07月09日)研究人员已经成功地利用基于Kinect类传感器的主动式扫描技术来重构室内场景。镜子和玻璃等反射表面是这种场景中经常出现的一种元素,而原来的研究很少能进行处理。尽管这听起来像是一个小小的遗漏,但镜子实际上对任何重建系统都是一个重大问题。一面完美的镜子可以展示出与直接观察别无二致的世界。因此,镜子基本上为“不可见”。
这种镜像几何与位于镜子背后的真实几何体重叠,并对重建造成了干扰。因此,为了避免整个场景的无效重建,将镜子重建为场景中的标准元素不仅是一个愿望,同时是一个要求。类似地,玻璃表面通常不由传感器重建,但仍应包括在重建模型之中。由于普通室内环境普遍存在镜子和玻璃,最近的场景重建方法要求用户在扫描中手动选择窗口和镜子,比如说Matterport3D。
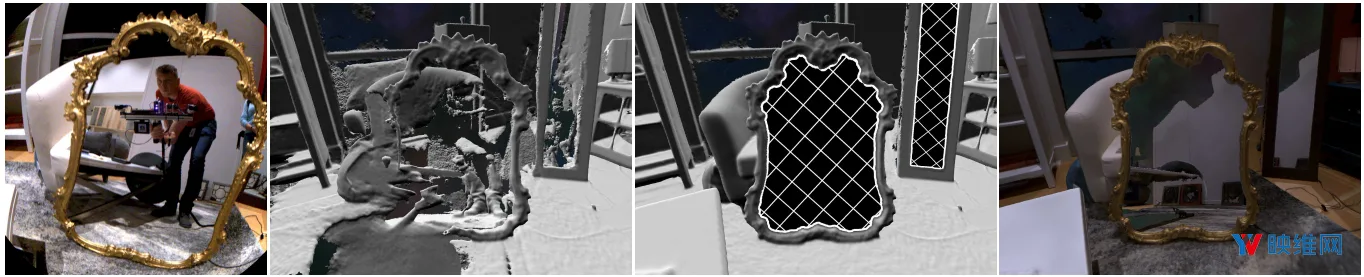
在Facebook最新的论文中,Facebook提供的方法可以自动检测和重建场景中镜子和玻璃表面,见图1。主要的想法是,在捕捉设备上添加一个只有在摄像头面向镜子或玻璃表面时才能观察到的标签。在研究中,使用了AprilTag的镜像版本。基于对这一标签的观察,不仅能检测反射表面,同时可以稳健地估计表面的平面参数。另外,Facebook研究人员还开发了一种基于多特征的方法来检测平面镜像表面的边界。
......(全文 1306 字,剩余 815 字)











