HoloLens新专利可共享空间地图,提升扫描建模效率

文章相关引用及参考:mspoweruser
(映维网 2017年11月06日)微软HoloLens的一个最佳功能是可以把虚拟对象固定在现实空间中,即便你离开再回来,虚拟对象仍然会停留在同一个地方。
这个令人印象深刻的功能赋予了虚拟对象一定的真实世界的永恒性。这是因为HoloLens在一开始会创建一个空间地图,然后通过这些数据来固定与其环境相关的空间物体。地图会存储在设备上,然后在你重新进入该区域时系统会重新调用地图。
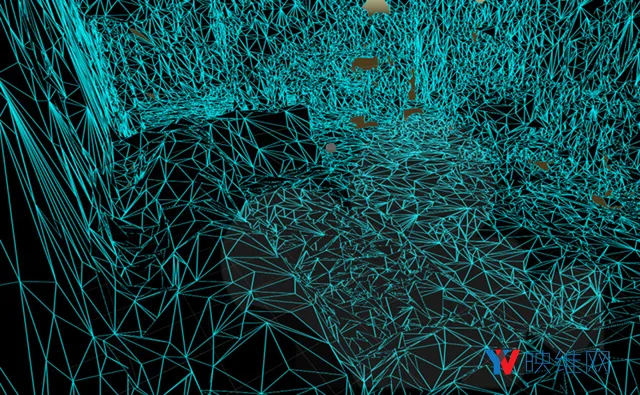
在一份专利文件中,微软希望通过在线共享其他HoloLens用户的存储结果,其可以加速第一次扫描时的繁琐过程。这意味着新用户进入某个区域时将不必重新创建表面地图,他们可以简单地访问一个现有的地图。
专利文件写道:“计算机接口被配置为接收真实世界环境一部分的多个本地3D模型,每个本地3D模型由位于真实世界环境中的不同增强现实设备生成。全局模型生成模块被配置为组合本地3D模型,从而生成全局3D模型,并将全局3D模型的至少一部分传输到远程设备。与单独的本地3D模型相比,全局3D模型代表了真实环境的更大部分。这允许设备远程地探索和增强真实环境的虚拟版本。增强共享模型被配置为从远程设备处接收渲染数据,并且当增强现实设备位于真实世界环境中时将渲染数据发送到增强现实设备。位于真实世界环境的增强现实设备将使用渲染数据来渲染虚拟对象。”
微软专利没有具体说明数据是否会对外公开,但如果系统能够快速实现全局分享,并且由访问一个区域的新HoloLens用户定期更新,这样一个系统将极其强大和有用。专利还指出,渲染虚拟对象的任务也可以到提交至在线服务器,而这已经成为了HoloLens SDK的一个功能。详细的专利文件请访问USPTO(点击前往)。
......(全文 661 字,剩余 34 字)