谷歌提出基于特征级领域自适应的机器人动作模型训练方法

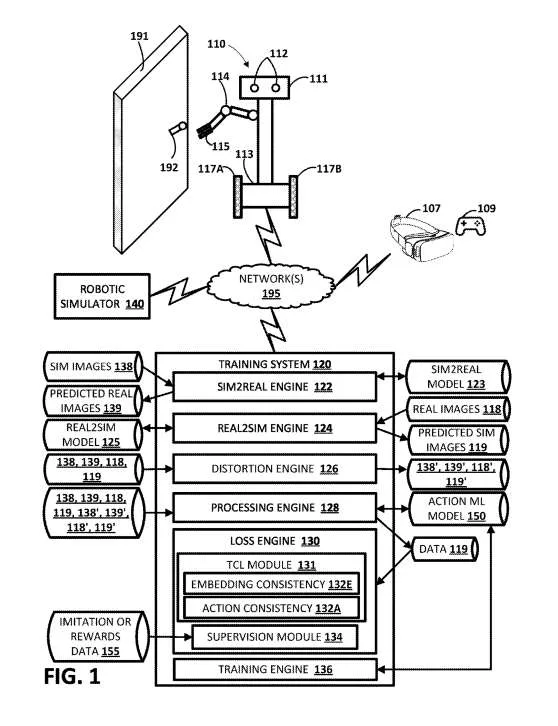
在使用演示数据和模仿学习来训练动作ML模型的实现中,采用VR/AR头显形式的计算设备
(映维网Nweon 2025年10月27日)为了帮助训练机器人,诸如特斯拉和英伟达等机构和团队纷纷把目光投向了XR头显。通过这种方式,机器人可以1:1地复刻映射人类操作员的动作,而软件可以以实现第一人称视频的实时传输和精确控制输出,同时保持极低延迟。在一份专利申请中,谷歌同样有提出可以采用XR头显来帮助训练机器人。
目前存在一系列基于机器学习的机器人控制方法。其中,特定方法使用仅基于真实世界物理机器人数据的训练数据来训练机器学习模型。然而,基于真实世界物理机器人的数据生成训练数据需要在生成训练数据时大量使用一个或多个物理机器人。这可能耗时、消耗大量资源、导致所使用的机器人磨损、引起安全问题、和/或需要大量的人工干预。
考虑到这一点,业界已经提出使用机器人模拟器来生成模拟数据,相关模拟数据可用于生成用于训练和/或验证机器学习模型的模拟数据,以作为真实世界数据的补充。然而,在真实机器人和模拟机器人和/或在真实环境与由机器人模拟器模拟的模拟环境之间通常存在显著的“现实差距”,并影响机器学习模型的性能。
......(全文 8764 字,剩余 8311 字)











