爱丁堡大学研发液态金属柔性手套实现高精度手势识别

在30个手势中实现了99.15%的准确率
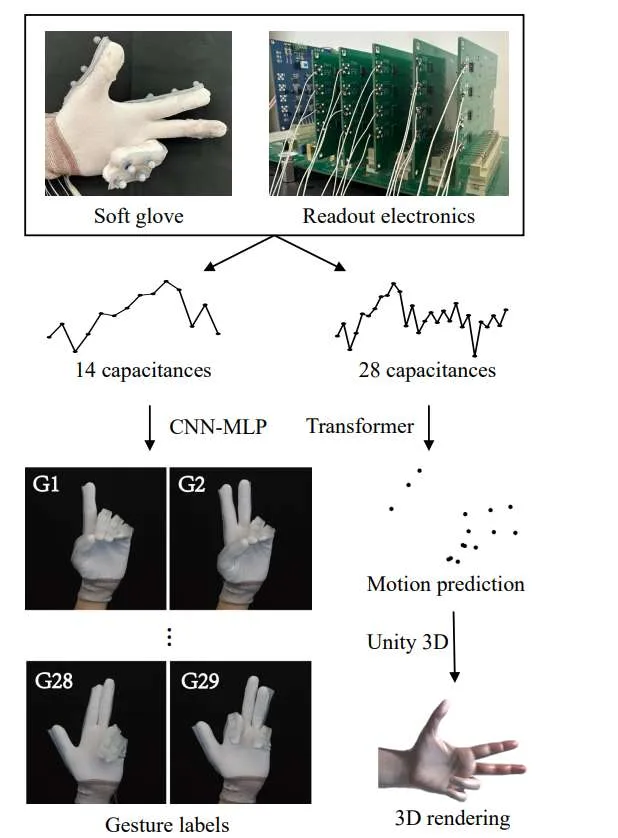
(映维网Nweon 2025年07月24日)随着人机交互(HCI)需求的增加,柔性可穿戴手套已成为虚拟现实等领域的前景解决方案。然而,这项技术目前依然存在灵敏度不足、耐久性有限等问题,阻碍了其广泛应用。在一项研究中,英国爱丁堡大学团队介绍了一种基于线形电极和液态金属(EGaIn)的高灵敏度、模块化和柔性电容式传感器,并将其集成到适合人手解剖结构的传感器模块中。
所提出的系统可以独立捕获每个手指关节的弯曲信息,而相邻手指之间的额外测量可以记录手指间距的细微变化。设计可以使用点云实现精确的手势识别和复杂运动的动态手部形态重建。
实验结果表明,基于卷积神经网络(CNN)和多层感知器(MLP)的分类器在30个手势中实现了99.15%的准确率。同时,基于transformer的深度神经网络(DNN)在平均距离(AD)为2.076\pm3.231 mm的情况下,准确地重建了动态手部形状,单个关键点的重建精度比SOTA基准高出9.7%至64.9%。手套在手势识别和手部重建方面具有优异的准确性、鲁棒性和可扩展性,是下一代人机交互系统的理想解决方案。
......(全文 2261 字,剩余 1871 字)











