索尼研发NeuroTouch神经形态触觉传感器实现高精度手势识别

将弹性体转换为丰富而细致的交互式控制器
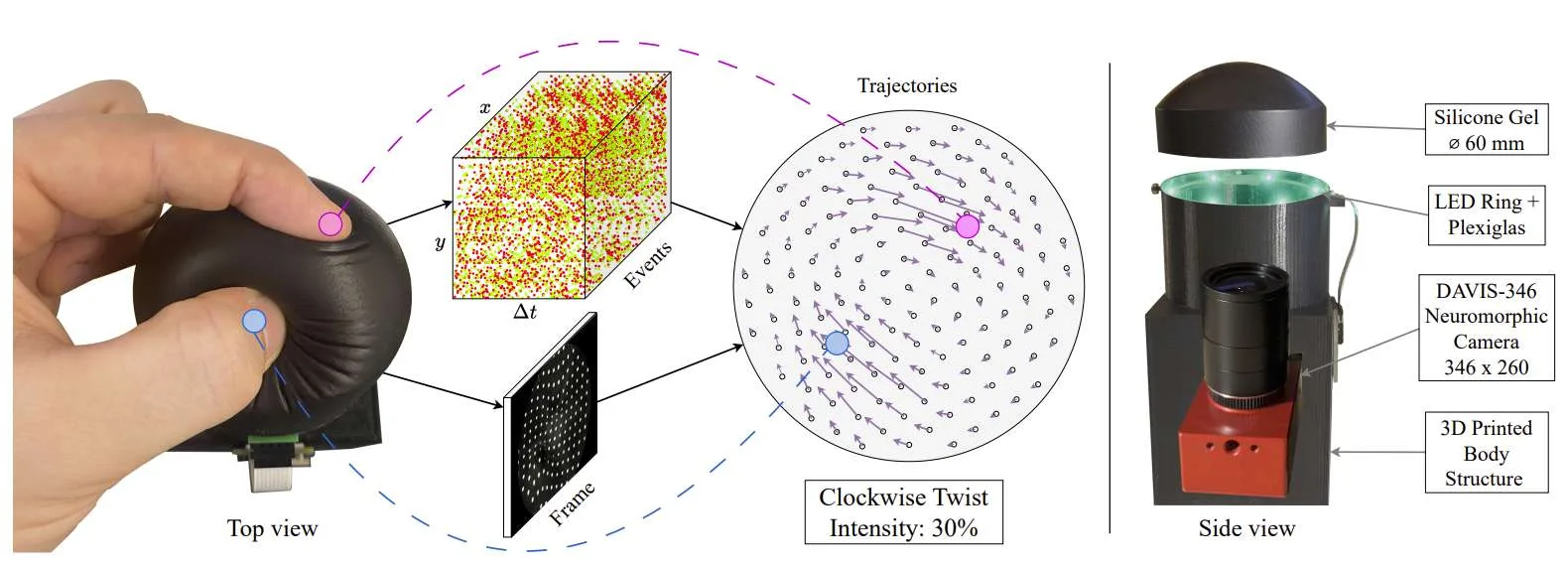
(映维网Nweon 2025年05月29日)在一项研究中,索尼团队提出了一种基于光学的触觉传感器NeuroTouch。它将高度可变形的圆顶状柔性材料与集成的神经形态摄像头结合在一起,利用基于帧的动态视觉进行手势检测。
所提出方法通过使用基于事件的方法追踪打印在弹性体表面的标记,并通过基于RANSAC的技术来利用它们的轨迹,将弹性体转换为丰富而细致的交互式控制器。
为了对框架进行基准测试,团队创建了一个25分钟的手势数据集。这个实时、轻量级和低延迟的管道在手势分类方面的准确率超过91%,手指定位距离误差为3.41毫米,手势强度误差为0.96毫米,并有望应用于增强现实/虚拟现实等设备。
交互式设备是用户和数字环境之间的桥梁,其应用范围包括增强现实和虚拟现实等。然而,尽管它们扮演着关键角色,但当前的交互式设备往往会给用户带来限制,尤其是手柄和刚性控制器。尽管它们坚固而精确,但可能缺乏自然和直观交互所必需的表现力和人体工程学适应性。
另外,它们的刚性和传统设计往往不能适应手部功能受损的用户,限制了无障碍性。
......(全文 1906 字,剩余 1489 字)











