研究员开发提高VR语义识别效率的新型点云转换器框架ESP-PCT

ESP-PCT的准确率达到了93.2%
(映维网Nweon 2025年02月12日)由东南大学,香港城市大学,瑞士数据科学中心,博世,新加坡科技设计大学,中国科学技术大学组成的团队认为,语义识别在虚拟现实应用中至关重要,可以帮助实现沉浸式和交互式体验。一种富有前景的方法是利用毫米波信号产生点云,但当前毫米波点云模型的高计算和内存需求阻碍了它们的效率和可靠性。
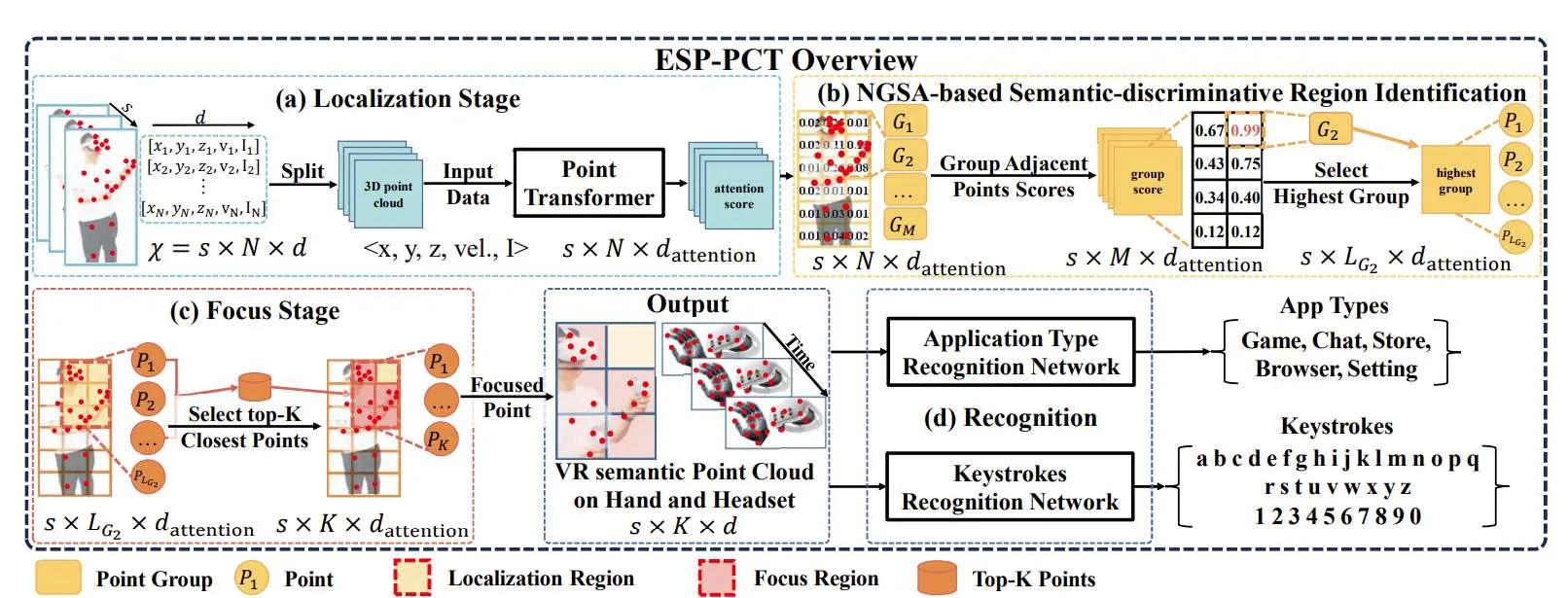
为了解决这一限制,研究人员介绍了一种新颖的增强语义性能点云转换器ESP-PCT,而它具有为VR应用量身定制的两阶段语义识别框架。
ESP-PCT利用感官点云数据的准确性来优化语义识别过程,其中定位和焦点阶段以端到端方式联合训练。团队在各种VR语义识别条件下评估了ESP-PCT,并证明了识别效率的实质性提高。值得注意的是,ESP-PCT的准确率达到了93.2%。
......(全文 1682 字,剩余 1381 字)











