苹果AR/VR专利介绍了Vision Pro游玩空间安全防护系统

防护系统
(映维网Nweon 2024年02月22日)熟悉VR头显的用户应该都知道一种所谓的防护系统。因为VR头显会用数字内容取代用户周遭的现实世界,所以为了防止用户因失去物理世界视觉感知而与现实物品碰撞,设备需要一种提醒告示系统,从而在用户即将遇上危险时提供相关预警。
在名为“Immediate proximity detection and breakthrough with visual treatment”的专利申请中,苹果提出了一种根据接近度检测来呈现警示性视觉元素或者提供透视视图,从而提醒用户的方法。
在一个实施例中,当用户接近物理对象时,可以在沉浸式应用程序中呈现给特定虚拟内容的呈现,以便用户能够意识到物理环境。
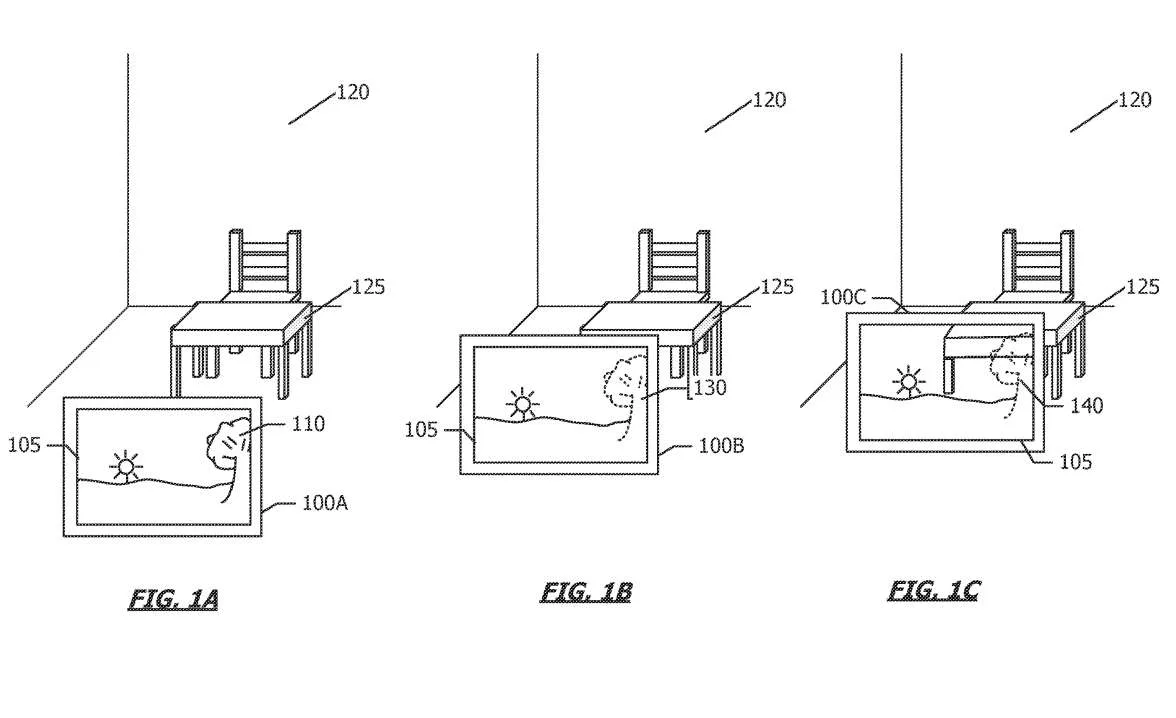
图1A示出具有呈现虚拟内容110的显示器105的示例性电子设备100A。为清楚起见,电子设备100A是指位于第一位置的电子设备。位于第二位置的电子设备称为100B,位于第三位置的电子设备则被称为100C。
图1B示出的设备100B位于物理环境120中的第二位置,更靠近物理对象。在本例中,电子设备100B正在接近物理环境120中的物理桌125。
......(全文 5318 字,剩余 4962 字)