161篇文献回顾:AR遮挡技术的过去,现在和未来

主要回顾了1992年1月至2020年8月期间就AR应用遮挡处理发表的161篇论文
(映维网Nweon 2023年01月18日)AR增强现实主要是通过在视图叠加额外的数字虚拟内容来增强现实世界。但这个过程十分具有挑战性,例如你必须执行对真实世界的精确追踪,以便将虚拟数据配准到增强场景之中。又如,你必须解决相互遮挡问题以确定真实内容是否位于虚拟内容前面的区域,或反之亦然,从而相应地呈现虚拟内容。
实际上,遮挡处理是AR中一个长期存在的问题,近30年来一直是社区关注的一个活跃课题。在名为《Occlusion Handling in Augmented Reality: Past, Present and Future》的论文中,巴西巴伊亚联邦大学的团队探究了AR遮挡处理的过去,现在和未来。
他们对161篇文献的回顾发现,研究人员和开发人员主要希望解决遮挡问题的三个不同方面,而它们可能是必须项的或可选项:
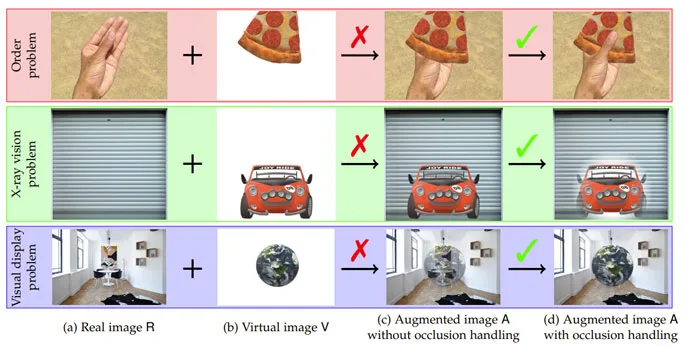
- (必需)顺序问题,亦即确定真实数据和虚拟数据之间的深度顺序;
- (可选)X射线视觉问题,允许对表示真实场景中被遮挡结构的虚拟数据进行视觉探索。取决于顺序问题的解决方案;
- (必需)视觉显示问题,增加对遮挡效果的支持,主要用于视频显示器(VST)和光学透视(OST)显示器。取决于顺序问题的解决方案;
尽管社区已经提出了越来越多的技术来应对AR遮挡问题,但这个问题依然远未得到完美解决。上面提到使用OST显示器或VST设备来可视化增强场景,或者为室外场景提供X射线可视化。在所述用例中,硬件和软件技术尚未成熟。
在论文中,巴西巴伊亚联邦大学的团队主要回顾了1992年1月至2020年8月期间就AR应用遮挡处理问题发表的161篇论文。
通过从不同但互补的角度看待这一领域,研究人员希望对这一领域的主要成就和公开问题进行总体概述,包括当前的挑战、研究趋势,以及对AR中遮挡处理领域未来方向的建议。
◐ 1. 顺序问题
首先,假设每个图像I是一个矩阵,具有m行和n列,存储在每个单元I(x,y),其中x∈[1,n]和y∈[1、m],同时RGB像素I(x、y)=[Ir(x,y)、Ig(x,x)、Ib(x、y)]T分别具有红色、绿色和蓝色通道。
......(全文 7848 字,剩余 7140 字)