三星研究院提出用于AR眼镜触觉手套的人造肌肉致动器

三星研究院和韩国亚洲大学等
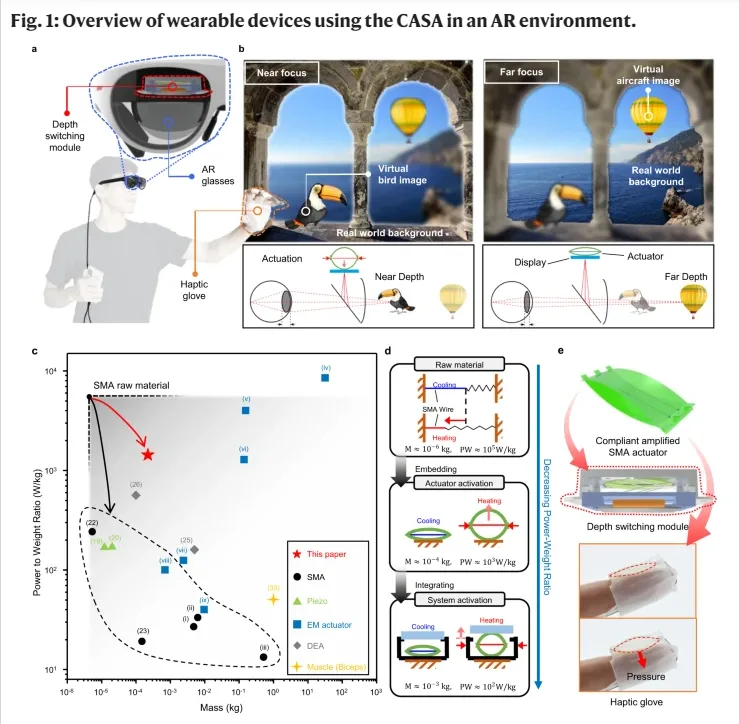
(映维网Nweon 2022年08月02日)由三星研究院和韩国亚洲大学等组成的研究团队日前在《自然-通讯》发表了一篇题为“”的《通过多功能人造肌肉驱动的紧凑型可穿戴增强现实设备(Actuating compact wearable augmented reality devices by multifunctional artificial muscle)》论文。简单来说,他们提出了一种用于增强现实眼镜触觉手套的人造肌肉致动器。
为了进一步提高沉浸感,社区正在积极探索一系列的触觉反馈技术,而其中最重要的一个载体是触觉手套。然而,集成到可穿戴设备中的致动器和传感器必须小巧轻便,并且通常需要移动性。
传统的致动器在实现更先进的功能方面存在一定的局限性,难以实现轻薄的形状参数和高功率密度。
由三星研究院和韩国亚洲大学等组成的研究团队提出了一种人造肌肉致动器,以解决一直困扰传统致动器类型的实际工程挑战,例如电磁致动器。其中,人造肌肉致动器可以作为一个小占地面积、高功率的驱动系统。
他们设计了一种基于形状记忆合金(SMA)的轻质高功率人造肌肉致动器,即所谓的CASA致动器。由这一团队全新开发的版本重量轻(0.22g),但足够耐用,可以支撑比自身重800倍的重量。
......(全文 818 字,剩余 403 字)








