微软AR/VR专利提出采用动态可寻址快门阵列(DASA)与多透镜阵列的组合

采用动态可寻址快门阵列(DASA)与多透镜阵列的组合
(映维网Nweon 2022年07月07日)大多数人都会认同,当前的头显形态远非理想。所以,行业的各家厂商都在积极探索优化头显的方法。现有配置倾向于使用单个透镜聚焦图像以供用户眼睛查看。然而,单个透镜往往体积大、重量重,这就排除了所需的轻质紧凑形状参数。
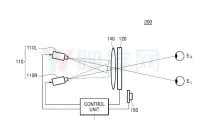
行业有尝试通过多透镜阵列(MLA)代替大型单透镜。遗憾的是,有多个因素影响了采用MLA的头显图像质量。例如,用于MLA的一个透镜的光可以渗入相邻透镜,而这种串扰会降低图像质量。
针对这个问题,微软在名为“Head mounted display device”的专利申请中提出了自己的解决方案。
头戴式显示器设备可以向用户呈现虚拟内容。内容或图像通常在称为“视窗”的图像区域中再现。但对于传统的头显设备,宽视野图像的再现可能十分困难,因为用于显示宽视场图像的现有技术通常试图优化整个视窗的图像。这种全视窗图像优化一般需要采用复杂、昂贵和笨重的光学组件。替代的传统设计采用单个光学元件,例如单个透镜。
......(全文 3821 字,剩余 3438 字)