微软AR/VR专利提出体素化点云,由编码器执行以压缩三维视频数据

压缩
(映维网Nweon 2022年06月16日)随着增强技术的发展,科幻作品描述的全息通信有望取代传统的2D视频。但是,表示复杂动态3D场景会生成大量数据。所以,如何进行压缩成为了发展新兴沉浸式3D系统通信的一个重要挑战。
在名为“Motion-compensated compression of dynamic voxelized point clouds”的专利申请中,微软提出了一种由编码器执行以压缩三维视频数据的示例方法,尤其是体素化点云。
取决于具体情况,表示3D数据存在一系列的选择。例如,密集体素阵列可以用于表示密集的体三维医学数据,而多边形网格则可以表示计算机图形学中常见的三维对象表面。点云非常适合对数据非常稀疏的真实世界对象进行采样,尤其是当拓扑不一定是2D流形时。
点云的另一种选择是稀疏体素阵列或体素云,亦即体素的任意集合。与点不同,体素具有体三维特性。点云和稀疏体素阵列消除了2D流形的常见问题,例如处理切割边的边界条件和拓扑随时间的变化。3D数据的另一种表示形式是一组颜色和深度映射。
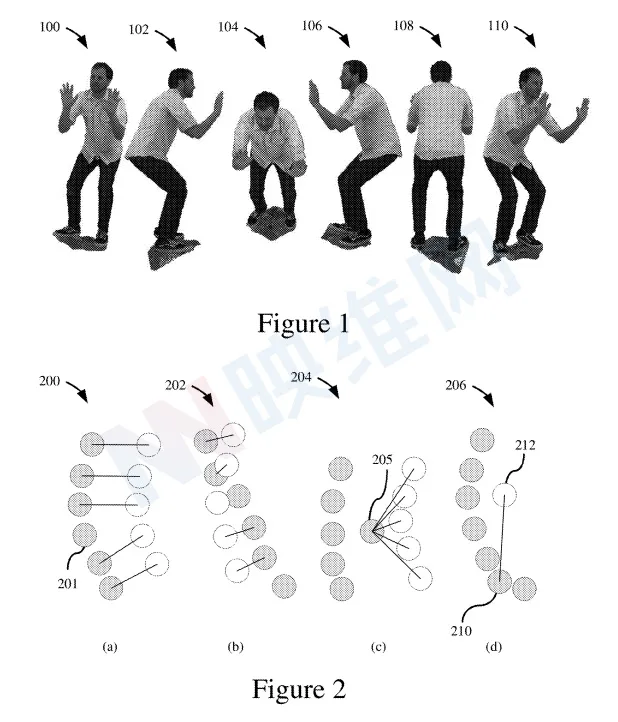
对于微软的发明,其主要用于稀疏体素阵列,又称体素化点云。例如,图1示出了成像对象的体素化点云的六个示例视点(100、102、104、106、108、110)。对于3D场景捕获中预期的数据类型,体素化点云比密集体素阵列更适合,并且它们避免了多边形网格与采样数据之间存在的各种问题。
与颜色和深度映射相比,体素化点云是更高级别的表示,因为重叠传感器映射之间的冗余和不一致已在多摄像头传感器融合步骤中消除。与任意点云相比,体素化点云具有实现优势,对于捕获的三维数据的实时处理非常高效。
......(全文 3969 字,剩余 3415 字)











