1khz采样率,Meta提出基于事件摄像头的眼动追踪全新闪烁检测算法

事件摄像头/Event Camera/Event-Based Camera
(映维网Nweon 2022年03月15日)近年来,新兴的事件摄像头/Event Camera/Event-Based Camera越来越受到行业的关注。Event Camera是一种生物启发式传感器,是研究人员受人类视网膜原理启发而设计了神经拟态视觉传感器。与传统摄像头不同,神经拟态视觉传感器没有“帧”的概念,并且是采用基于事件驱动的方式来捕捉场景中的动态变化。当现实场景中发生变化时,神经拟态视觉传感器会产生像素级的输出,即Event/事件。一个事件可以包括t,x,y,p。其中, x和y是事件在2D空间的像素坐标,t是事件的时间戳,p是事件的极性。事件的极性代表场景的参数变化(如亮度): 上升(positive)或下降 (negative)。
事件摄像头的像素独立地报告对数强度的变化,而不是像传统摄像头那样以固定帧速率对所有像素进行采样。事件表示为(x,y)位置、极性和时间戳t的元组,每当测得的日志强度变化超过预设阈值时触发。这使得事件数据高效且稀疏,因为只记录场景变化。事件摄像头具有高动态范围(≈ 120 dB),几乎没有运动模糊,比传统摄像头耗电少,并且以亚毫秒的延迟报告事件。
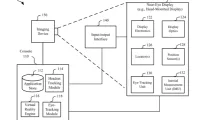
眼动追踪是AR/VR头显中的一项关键任务,例如用户交互,注视点渲染和眼睛相关生物分析等等。另外,诸如变焦显示器等先进应用同样依赖眼动追踪来实时确定合适的焦平面。事件摄像头非常适合AR/VR头显中的眼动追踪传感器,因为它们满足电源和延迟的关键要求。AR/VR头显必须低功耗,以延长移动系统的续航并减少头显产生的热量。另外,眼动追踪需要在高采样率下运行,以允许自适应显示技术无缝运行,并适用于可能需要高达1 kHz采样的用户认证等应用。
实际上,如果你有关注映维网的专利或论文分享,你应该会注意到Meta和索尼等厂商都有探索与事件摄像头相关的应用。在名为《Event-Based Kilohertz Eye Tracking using Coded Differential Lighting》的论文中,Meta又介绍了与所述主题相关的探索。
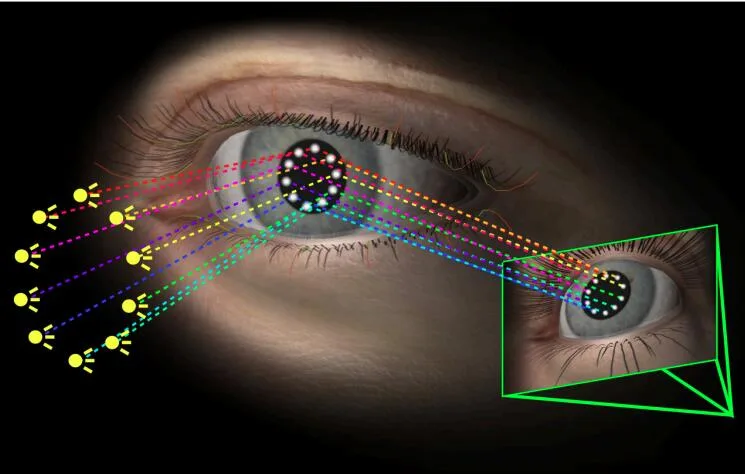
大多数现代基于视频的眼动追踪系统使用瞳孔中心角膜反射(PCCR)。这种方法的工作原理是将光源(通常是红外光谱)照射在眼睛。这会在角膜表面引起镜面反射,亦即glint闪烁,而摄像头可以将其检测为明亮的峰值,然后用于估计角膜球体的位置。
Meta在论文中提出了一种基于事件摄像头的全新闪烁检测算法。团队指出,相关算法轻量,采样率为1khz,可以有效解决光与闪烁的对应问题。通过高频脉冲照明,事件摄影头可以根据需要在闪烁反射处生成事件。然而,快速变化的照明同样会导致图像的其他部分(皮肤、虹膜、巩膜等)发生事件,并可能会超过摄像头的事件率,消除所述传感器的功率优势。
......(全文 4351 字,剩余 3446 字)