微软研发MR+机器人框架:基于HoloLens实现机器人操控交互

查看引用/信息源请点击:techxplore
混合现实+机器人
(映维网Nweon 2022年03月09日)在过去的数十年间,工程师不断为我们带来功能和性能越来越先进的技术,比方说“空间计算”。
空间计算是指计算机、机器人和其他电子设备“感知”周围环境并创建其数字表示的能力,而混合现实等尖端技术可以显著增强空间计算,并帮助创建复杂的传感和测绘系统。
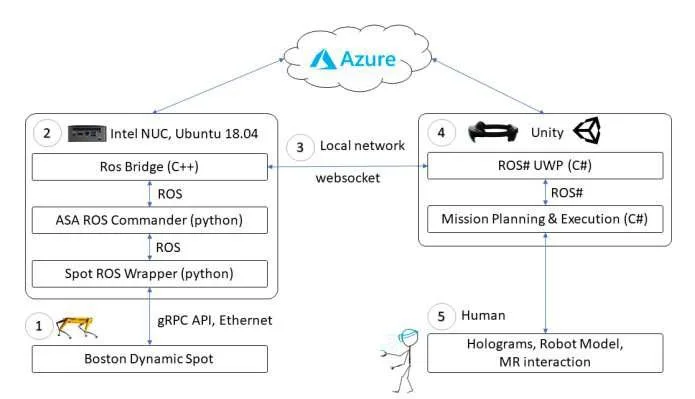
日前,微软混合现实与人工智能实验室(Microsoft Mixed Reality and AI Lab)和苏黎世理工学院的研究人员提出了一种将混合现实和机器人技术结合起来,以增强空间计算应用的框架。
能够感知周围环境并以数字方式表示的空间计算为人机交互提供了全新的能力。特别是,在混合现实设备结合空间计算和Egocentric Sensing自我中心感知可允许系统捕获和理解人类行为,并将其转化为具有空间意义的行为。
所以在名为《Spatial Computing and Intuitive Interaction: Bringing Mixed Reality and Robotics Together》的论文中,团队提出了基于上述理念的三个机器人用例系统:检查任务规划;基于手势的控制;以及沉浸式远程操作。
第一个系统设计用于规划需要检查给定环境的机器人任务。基本上,人类用户穿戴HoloLens在目标环境中移动,放置全息图,形成定义机器人轨迹的航路点。另外,用户可以突出显示希望机器人收集图像或数据的特定区域。相关信息经过整理后,就可以在机器人检查环境时用以指导它的动作和行动。
......(全文 1211 字,剩余 739 字)