Meta专利提出为全身穿戴多个传感器实现全身动捕

预测位置信息
(映维网 2022年01月06日)对于生成人体肌肉骨骼表示的计算机应用程序,系统有必要知道用户身体的空间定位、方向和运动,以提供身体运动的真实表示。例如,通过在虚拟现实环境中追踪用户双手的空间位置,应用程序将能够表示虚拟双手的运动,从而允许用户与VR环境中的虚拟对象交互。
使用可穿戴传感器追踪运动的现有技术包括使用从附加到用户身体不同部位的多个惯性测量单元(IMU)获取的信息,以及使用外部成像设备(例如固定位置摄像头)重建用户身体部位的位置和方向。
在名为“Methods and apparatus for predicting musculo-skeletal position information using wearable autonomous sensors”的专利申请中,Meta就介绍了一种利用可穿戴传感器来获取并预测位置的方法和装置。具体来说,在确定一个节段的位置和方法信息后,系统可以相应地预测其他铰接节段,从而建模完成的身体部位。
在运动学中,刚体是显示各种运动属性的对象,例如位置、方向、角速度、加速度。刚体的一个分段的运动属性可以根据分段连接方式中的约束确定刚体其他分段的运动属性。例如,手臂可建模为两段式铰接刚体,其上部对应于在肩关节处连接至躯干的上臂,下部对应于前臂,其中两段在肘关节处连接。作为另一个示例,手可以建模为多节铰接体,手腕中的关节和每个手指形成模型中多节之间的接口。在一个实施例中,刚体模型中的节段的运动可以模拟为铰接刚体系统,其中使用训练的统计模型预测模型中节段相对于其他节段的方向和位置信息。
人体肌肉骨骼系统可以建模为多节段铰接刚体系统,关节形成不同节段之间的接口,关节角度定义模型中连接节段之间的空间关系。对关节运动的限制取决于连接节段的关节类型和限制关节运动范围的生物结构,如肌肉、肌腱、韧带。例如,连接上臂与躯干的肩关节和连接大腿与躯干的髋关节是允许伸展和弯曲运动以及旋转运动的球窝关节。相比之下,连接上臂和前臂的肘关节和连接大腿和小腿的膝关节允许更有限的运动范围。如本文所述,多段铰接刚体系统可用于模拟人体肌肉骨骼系统。
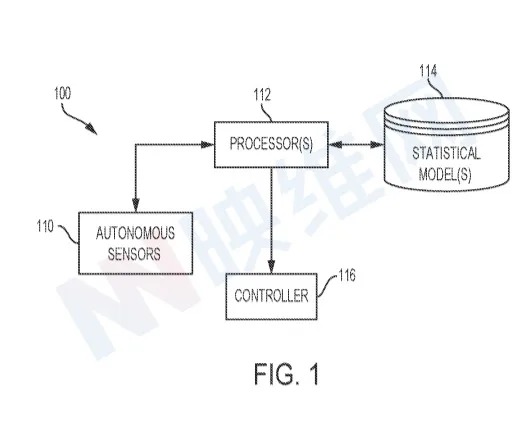
图1是一个示例性系统100。所述系统包括多个自动传感器110,其配置成记录由人体各部分的运动产生的信号。这里的自动传感器是指配置为测量身体部分的运动,并且不需要使用外部传感器的传感器。自动传感器110可包括一个或多个惯性测量单元(IMU)。在一个实施例中,IMU可用于感测关于附着IMU的身体部分的移动的信息,并且可随着用户随时间移动而追踪从感测数据导出的信息,例如位置和/或方向信息。例如,一个或多个IMU可用于在用户随时间移动时追踪靠近用户躯干的用户身体部分的移动,例如手臂或双腿。
......(全文 4738 字,剩余 3786 字)











