微软专利分享WMR系列VR头显支持MR透视效果的图像对齐方法和系统

用于对齐图像的方法和系统
(映维网 2021年12月27日)为了支持不同的功能,AR/VR系统一般可以搭载不同类型的摄像头。例如可以通过摄像头提供的视频画面来帮助AR/VR头显用户感知现实世界,从而避免迷失方向和/或安全危险。AR/VR系统可以以多种方式呈现摄像头捕获的视图。然而,通过前置摄像头图像来提供真实环境视图的过程带来了众多挑战。
由于多种原因,前置摄像头的排列方式难以一一对应双眼,而这需要系统对齐前置摄像头的图像内容。通常,为了执行对齐过程,系统需要详细的时间戳信息和姿势信息。然而,因为不同的摄像头可能在不同的时域中工作,所以它们具有时间偏移。另外,时间戳数据有时根本不可用,因为摄像头之间可以彼此远程操作,并且时间戳数据不被传输。尽管对齐图像内容提供了巨大的好处(特别是在全息图的放置和生成方面),但前面所述的问题构成了一定的障碍。
在名为“Dual system optical alignment for separated cameras”的专利申请中,微软介绍了一种用于对齐图像的方法和系统。
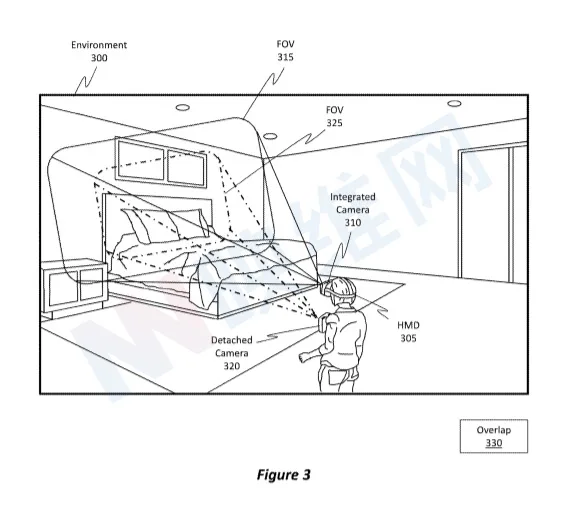
◐ 集成式摄像头和分离式摄像头操作
......(全文 3421 字,剩余 3030 字)











