微软专利介绍了用于VR、AR定位追踪系统的LED同步机制

用于VR/AR系统的LED同步机制
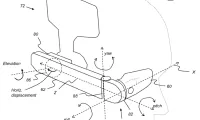
(映维网 2021年12月02日)AR/VR头显允许用户查看虚拟环境并与之交互。头显可以与手持控制器和/或其他手持外设接口。为了提升体验的沉浸感,当用户在空间中移动设备以提供输入时,可以追踪头显和手持控制器的姿态。这种姿态追踪同时可用于游戏以外的其他计算设备交互。
为了追踪用户的位置移动,或用于单独控制器的移动,头显设备可以使用光学传感器,例如用于检测在头显附近发光的LED标记的摄像头。当使用这种LED标记时,系统需要同步LED发射和摄像头曝光之间的定时。LED发射时间和摄像头曝光窗口之间的定时同步对于图像质量、精度和功耗非常重要。Bluetooth Low Energy(BLE)通常具有10ms或更长的数据包延迟和不确定性,这对于LED发射时间控制而言并不实际。另外,头显的摄像头模块和蓝牙芯片可能来自不同的时钟源,从而可能导致时钟漂移。所以,LED和摄像头定时同步成为一项具有挑战性的任务。
当实施LED光学同步机制时(例如六自由度VR控制器中使用的同步机制),为了确保正确的图像捕获,LED发射时间可设置为远长于摄像头曝光时间。由于头显和六自由度控制器之间没有定时同步,光学图像同步精度可能会受到限制。为了减少过多的LED发射时间,必须在接近摄像头实际曝光时间的情况下激活LED。在许多系统中,为了确保摄像头能够捕获LED,由于摄像头曝光时间的不确定性,LED发射时间可能比摄像头曝光时间长得多。这可能导致功耗增加。
另外,为了拍摄更清晰的图像,可以减少摄像头曝光时间,尤其是当摄像头或控制器处于运动状态时。对于头显,光学同步需要视线视图,因此头显应具有控制器的清晰视图。然后,每当控制器移动到摄像头视场之外时,控制器必须进入重新初始化模式。在重新同步过程中,LED通常需要设置为完全打开,亮度增加或最大,以便启用图像捕获并进入重新同步,这同样会增加功耗。
控制器和头显之间的通信通常为无线,并在许多情况下使用蓝牙。对于头显,当使用高频时钟时,需要计算每个摄像机帧的时钟周期数以追踪摄像头帧时间。另外,LED循环的开始时间需要与头显同步。
不准确的同步会导致较差的图像质量和准确性,造成控制器追踪问题,从而对用户体验产生负面影响。另外,不准确的同步会造成不必要的计算资源使用和过度的功耗。在名为“Led synchronization for virtual and augmented reality devices”的专利申请中,微软提出了一种LED同步方法。
......(全文 2883 字,剩余 2014 字)