微软专利介绍了MR系统深度映射信息的处理方法和技术

处理深度映射,减少计算量
(映维网 2021年11月26日)为了捕获复杂的3D几何图形,MR系统依赖于深度传感系统生成的深度映射信息。通过用光束照亮目标场景并分析反射光信号,MR系统可以利用这种深度信息来确定设备和特定对象之间的相对距离,同时识别对象的特定轮廓、边面和形状。
要计算单个深度映射或曲面网格,系统需要捕获大量的图像。图像越多,功耗就会大幅增加,而这又会影响MR系统的续航,甚至是整体形状参数设计。
在日前公布的三份专利申请中,微软介绍了深度映射处理方法和技术的不同方面。微软表示,发明描述的实施例能够减少计算量,并允许以高于传统方法的频率来生成深度映射。
◐ 1. 混合现实系统与头显示例
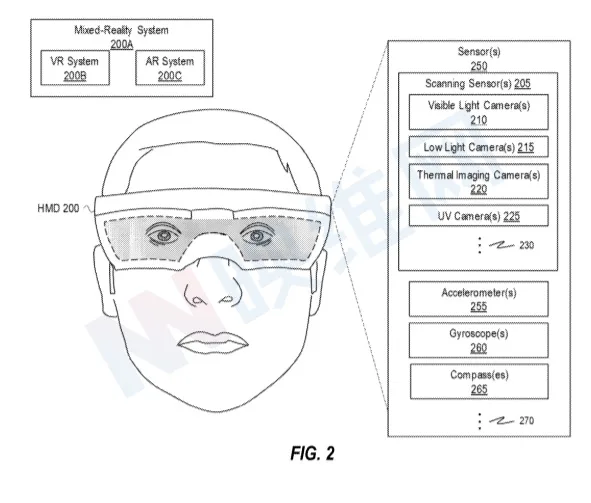
图2是头显200的示例。头显200可以是任何类型的MR系统200A,VR系统200B或AR系统200C。
头显200包括传感器250,传感器包括扫描传感器205和其他传感器,例如加速计255、陀螺仪260、指南针265。在一个实施例中,HMD 200包括图2中未示出的其他互感知和/或外感知传感器,例如眼动追踪系统、基于无线电的导航系统、麦克风和/或其他感测组件。
头显200中的视觉惯性同时定位和映射功能(SLAM)将一个或多个摄像头获得的视觉追踪数据与加速计255、陀螺仪260和指南针265获得的惯性追踪数据进行融合(例如使用姿态滤波器),以实施例六自由度定位。
......(全文 6578 字,剩余 6109 字)











