微软专利为AR/VR介绍了一种空间定位设计服务

在虚拟环境中测试,评估和开发定位算法
(映维网 2021年11月22日)一般来说,定位是指代理尝试确定其相对于周围环境的位置,例如智能设备。在各种环境中识别和追踪车辆、机器人和智能设备等的位置,从而执行其他计算任务是一项必要的功能,尤其是当GPS不足时。
定位对于虚拟现实和混合现实同样非常重要。为了正确显示数字内容,系统需要知晓头部的位置和方向。定位可能包括一个或两个视觉和惯性组件。视觉部分可涉及处理由摄像头或多个摄像头收集的一组图像,而惯性部分则可包括处理从惯性测量单元(IMU)收集的数据,例如加速计和陀螺仪传感器读数。所述图像和数据的处理可允许系统计算由三维坐标定义的主机设备位置。
在名为“Spatial localization design service”的专利申请中,微软介绍了一种空间定位设计服务。具体来说,发明描述的技术使用合成世界接口来对数字环境、传感器和运动建模,以用于评估和开发定位算法。
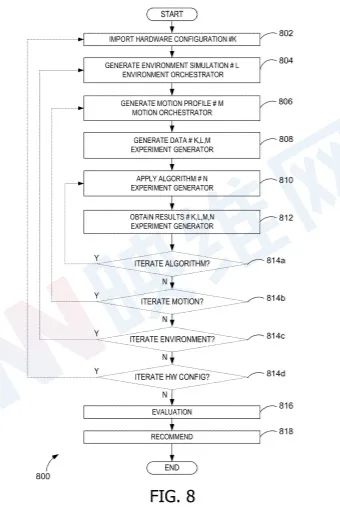
在一个实施例中,传感器平台模拟器与运动协调器、环境协调器、实验生成器和实验运行器一起运行,以在虚拟环境中测试各种候选硬件配置和定位算法。
微软指出,通过测试给定定位算法的各种候选硬件配置,运动编排器、环境编排器和实验生成器可快速产生相对大量的数据,以确定最佳候选硬件配置,从而有利地加快开发进度和降低成本。
在一个实施例中,传感器平台模拟器可用于模拟包括一个或多个虚拟camera的硬件配置。环境编排器可以模拟一个或多个虚拟环境。运动编排器可以在一个或多个虚拟环境中模拟一个或多个模拟硬件配置的运动。实验生成器可以为在一个或多个虚拟环境中具有模拟运动的一个或多个模拟硬件配置生成合成实验数据。实验运行器可以用于迭代实验生成器以生成用于硬件配置、虚拟环境、运动和定位算法的一个或多个组合的合成实验数据。
......(全文 3030 字,剩余 2359 字)











