微软专利描述如何利用空间锚点构建AR/MR体验

利用空间锚点来构建AR/MR体验
(映维网 2021年11月18日)Spatial Anchors(空间锚点)表示存在于云中的物理点。对于增强现实应用,全息图可以附着到空间锚点。空间锚点的独特地方在于,它能够在云中存储和持久化,并在以后由创建它的设备或任何其他受支持设备进行查询。这能够实现锚点的云备份和基于云的锚点共享。
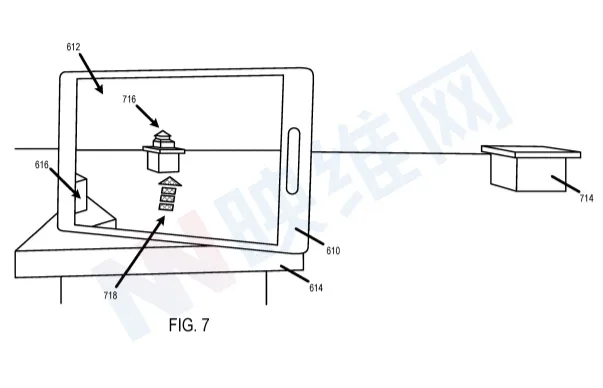
想象一下这个场景:你和一个朋友在家,你们同意通过增强现实设备开玩国际象棋,并在桌面定位全息棋盘。在设备端,两人可以在现实世界中的同一位置(桌面)查看棋盘。无论在物理空间中移动到何处,棋盘都将固定到一个点。你甚至可以结束会话并在第二天重新启动,无需再次放置锚。
对于幕后的技术原理,全息国际象棋应用使用一个空间锚点来保存棋盘的位置。这包括有关环境点的特征信息。全息国际象棋应用可以共享空间锚信息。然后,你朋友的HoloLens、iOS或Android设备端的应用程序可以查询空间锚点位置。一旦确定,任意多个设备的应用程序就可以在相同的物理位置呈现棋盘。
在一份名为“Connecting spatial anchors for augmented reality”的专利中,这家公司描述了一种连接空间锚点的增强现实系统。具体来说,发明介绍了一种利用空间锚点来构建AR/MR体验的技术。
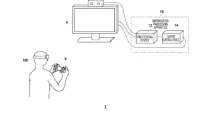
专利描述的计算设备包括摄像头、处理器、以及存储可由处理器执行的指令的存储器。摄像头捕获成像第一物理世界位置的第一图像数据,然后处理器基于第一图像数据创建第一物理世界位置的第一空间表示。
接收定义第一虚拟空间锚点相对第一图像数据中的成像特征的姿态的用户输入,追踪用户到第二物理世界位置的移动,通过摄像头捕获成像第二物理世界位置的第二图像数据,接收定义第二虚拟空间锚点相对于第二图像数据中的成像特征的姿态的用户输入,并向远程计算设备发送表示第一空间表示、第一虚拟空间锚点的姿态、第二空间表示的数据,第二虚拟空间锚点的姿态,以及从用户移动识别的第一虚拟空间锚点和第二虚拟空间锚点之间的位置关系。
......(全文 2872 字,剩余 2154 字)