苹果专利为AR、VR、电脑、手机等研究360度全景视频编码传输

带宽压缩,并用于处理2D视频数据
(映维网 2021年11月10日)360度视频通常是指同时记录全方向视图的片段记录,并可以使用全向摄像头和包含多个摄像头的装置来进行捕获。日前,美国专利商标局公布了一份与所述主题相关的苹果专利专利申请“Sphere projected motion estimation/compensation and mode decision”。
这项发明主要涉及360度编码,更具体来说,主要是用于处理2D视频数据并帮助视频实现带宽压缩。
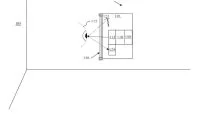
苹果解释道,尽管360度视频是360度,但视频数据本身通常由2D格式的图像数据表示。图像数据由排列在2D中的预定空间位置(x、y位置)的像素阵列表示。并且,尽管视场内不同深度的对象将在图像数据中表示,图像数据的大小不仅对应于对象的物理大小,而且对应于其与摄像头的距离,但表示对象的像素数据不随深度改变像素位置。
3D空间的2D表示可能导致不同位置的图像数据失真。例如,3D空间中的直线在2D图像数据中可能不会显示为直线。另外,当不同对象在360度视场内移动时,它们的大小和形状可能会发生扭曲。
......(全文 2290 字,剩余 1929 字)