扎克伯格宣布研发电子触觉皮肤ReSkin,实现AR/VR逼真物理交互

更接近于在元宇宙中实现逼真的虚拟对象和物理交互
(映维网 2021年11月02日)Meta首席执行官马克·扎克伯格日前表示,一种全新的触摸传感器和一种塑料材料有望支持元宇宙的开发。在一个研究项目中,Meta AI团队与卡内基梅隆大学的科学家开发了一种可变形的塑料“皮肤”。
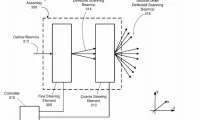
名为ReSkin的材料厚度不到3毫米,成本相对低廉。在原理方面,它嵌入可以产生磁场的磁性粒。当与另一个表面接触时,粒子所产生的磁场会发生变化。这时,传感器记录磁通量的变化,然后将数据输入解释施加力或接触的AI软件。
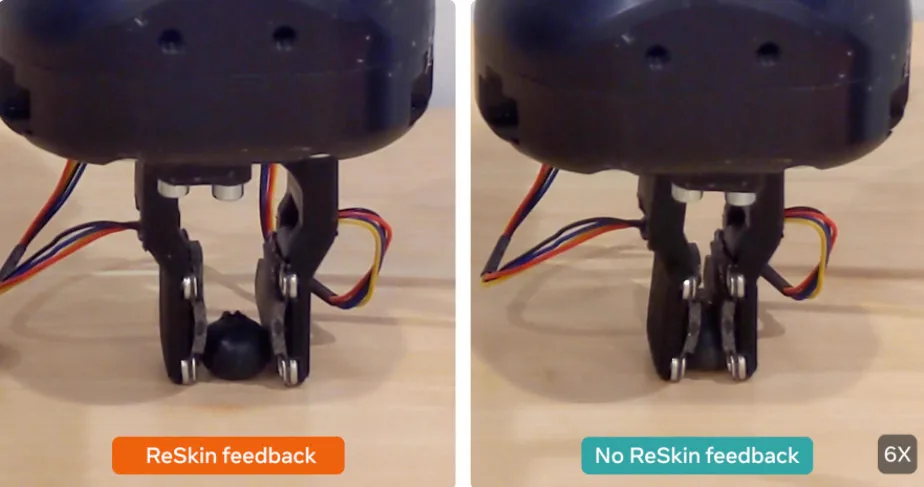
如下图所示,实验利用葡萄和蓝莓等软水果作为测试。在有ReSkin反馈的情况下,机器人能够控制力度,并轻轻地握持水果。但没有ReSkin反馈时,机器人则会用力过猛并压扁水果。
扎克伯格在Facebook发帖写道:“我们设计了一种高分辨率的触摸传感器,并与卡内基梅隆大学合作创造了一种薄薄的机器人皮肤。这使得我们更接近于在元宇宙中实现逼真的虚拟对象和物理交互。”
相关研究将在本月发表到学术期刊,但尚待同行评议。不过,团队已经在专门的页面介绍了这个项目的详细情况,下面是映维网的具体整理:
我们的触觉帮助我们导航周遭世界。有了它,我们可以收集关于物体的信息,比如轻重和软硬。从穿鞋到做饭,我们利用触觉来完成各种日常任务。如今,人工智能可以有效地融合视觉和声音等感官,但触觉依然是一个挑战。这在一定程度上是由于触觉传感数据有限。所以,人工智能研究人员希望将触摸融入到模型中,从而实现人类触摸感知的丰富性。
......(全文 2819 字,剩余 2258 字)