微软新HoloLens专利可用深度学习减少ToF功耗,延长系统续航

减少功耗,从而延长MR系统的续航时间
(映维网 2021年01月13日)为了捕捉复杂的3D几何图形,MR系统依赖于深度估计系统生成的深度信息。利用深度信息,MR系统可以确定设备和特定对象之间的相对距离,同时能够识别对象的特定轮廓、边面和形状。行业存在不同类型的深度估计系统,如飞行时间系统、点对点激光扫描和干涉测量等。
由于受环境影响小,测量帧率高,算法开发难度低等特性,飞行时间正日益受到厂商的关注。但这项技术的一个缺点是,为了计算单个深度映射或曲面网格,系统需要捕获大量的红外图像。图像越多,功耗就会大幅增加,从而缩短MR系统的续航。
为了提升MR系统的续航,同时为了利用高质量的深度信息来继续提供高质量MR体验,微软工程团队一直在探索不同的解决方案。日前,美国专利商标局公布了一份名为“Machine-learned depth dealiasing”的微软专利申请。
这份专利主要描述了一种优化深度估计操作的技术,方式是对红外相位深度图像的深度ambiguity进行dealiasing。微软指出,发明所述的技术可用于需要深度信息的任何场景,包括但不限于混合现实和自动驾驶。
在实现方面,可以致使照明器向目标对象发射参考光;作为响应,检测反射光,其中反射光包括从目标对象反射的一部分参考光;然后生成相位图像;产生相位图像的过程基于参考光和反射光之间的相位差。
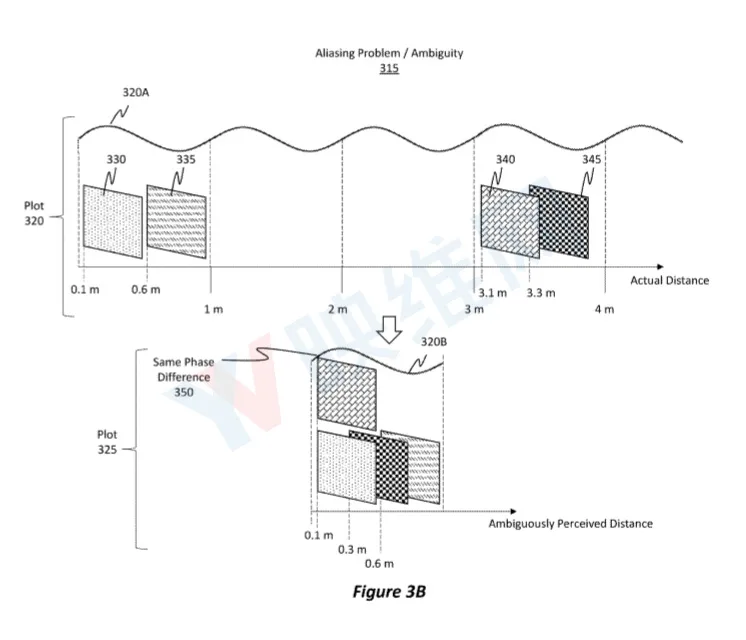
其中,相位差表示参考光和反射光的重叠正弦周期内的深度变化。另外,相位图像包括ambiguity,这是因为即便实际对应于不同的真实世界深度,由相位图像表示的多个不同深度都共享相同的相位差/偏移值。
......(全文 1023 字,剩余 453 字)