Facebook最新VR专利解释了『视场外控制器追踪』解决方案

包含视场追踪器和非视场追踪器的控制器追踪系统
(映维网 2020年12月01日)控制器是XR的重要交互方式,同时是体验沉浸式的关键一环。所以,如何精确地映射追踪控制器成为了各家厂商积极研究的课题。
日前,美国专利商标局公布了一份Facebook于2019年5月提交的控制器追踪技术专利申请,其介绍了一种包含视场追踪器和非视场追踪器的控制器追踪系统。
对于Quest等采用内向外追踪的VR一体机而言,控制器追踪是一个巨大的挑战,因为摄像头是嵌入至头显而非摆在外部,所以红外LED的检测和追踪变得相当困难。再加上控制器追踪圆环容易被遮挡或离开头显摄像头视场,所以问题正在成倍地增加。
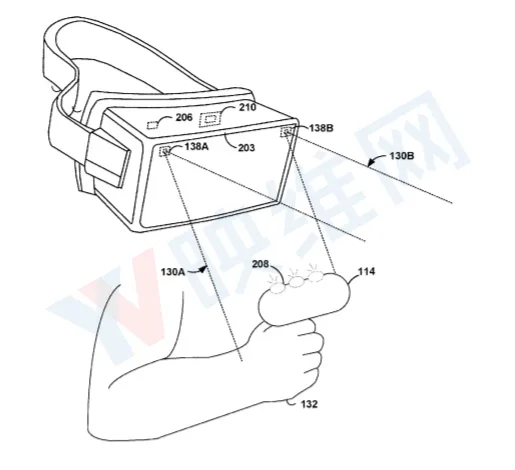
名为“Multi-Layered Artificial Reality Controller Pose Tracking Architecture Having Prioritized Motion Models(具有优先运动模型的多层人造现实控制器姿态追踪架构)”的Facebook专利申请主要介绍了一种包括视场追踪器和非视场追踪器的控制器追踪系统。
具体来说,当可在传感器/摄像头的视场内追踪控制器时,系统可以根据传感器/摄像头提供的图像数据来确定其姿态,亦即以视场追踪器的方式来追踪控制器。
当不可在传感器/摄像头视场内追踪控制器时(如控制器离开摄像头视场),或者如果控制器被视场的另一个对象遮挡时,系统可以利用其他数据和运动模型来确定控制器的姿态。
......(全文 1219 字,剩余 753 字)