南洋理工大学开发高精度手势识别机器学习架构

查看引用/信息源请点击:techxplore
下一步计划是根据视觉数据和传感器数据的仿生融合构建一个VR和AR系统。
(映维网 2020年08月28日)新加坡南洋理工大学和澳大利亚悉尼理工大学最近开发了一种旨在以高精度识别手势的机器学习架构,而方式是通过分析可伸缩应变传感器捕捉到的图像。研究人员已经将论文发表在《Nature Electronics(自然电子)》中,并表示新架构的灵感来自人类大脑。
南阳理工大学的陈晓东教授表示:“我们的项目概念源于人脑处理信息的方式。在人脑中,思维、计划、灵感等高感性活动不仅依赖于特定的感官信息,其同时属于不同感官的多种感官信息的综合整合。这启发了我们结合视觉信息和体感信息来实现高精度的手势识别。”
在解决实际任务时,人类通常会整合从周围环境收集的视觉信息和体感信息。这两种类型的信息彼此互补,而可以更好地帮助人类理解问题涉及的所有要素。
所以在开发手势识别技术时,陈晓东教授及同事确保它能够整合由多个传感器收集的不同类型信息。最终,团队的目标是建立一个能够以高精度识别人类手势的架构。
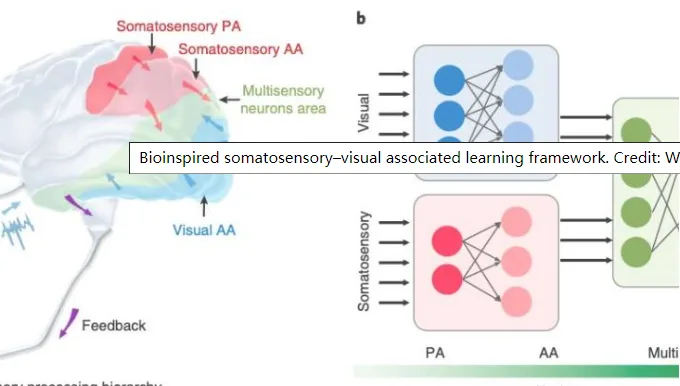
陈晓东教授解释道:“为了达到我们的目标,我们通过设计和制造可伸展的舒适传感器来改进传感器的数据质量。与现有的可穿戴传感器相比,这种传感器可以收集更精确的手势体感数据。另外,我们开发了一种生物启发式的体感视觉(Bioinspired Somatosensory-Visual;BSV)学习架构,它可以合理地融合视觉信息和体感信息,这类似于大脑中的体感-视觉融合结构。”
所述的BSV学习架构复刻了人脑是如何以多种方式融合体感信息和视觉信息,但方式是通过一个仿生生物神经网络结构。
......(全文 1244 字,剩余 665 字)








