英特尔为实感摄像头D400系列带来全新片上校准功能

适用于D400系列中的所有现有设备
(映维网 2020年04月20日)诸如英特尔实感D400系列的立体深度摄像头主要是根据立体视觉计算深度。具体而言,两个传感器将由一条已知的基线隔开。这两个传感器/成像仪的结构非常坚固,采用激光熔钢保持架设计,从而有助于在使用周期内保持校准和性能。
这一点非常重要,因为性能取决于两个摄像头之间的已知间距。要准确地理解场景,为每个像素计算深度的算法需要特定的信息。
为了进一步提升用户体验,英特尔日前通过固件更新为D400系列带来了全新的片上校准功能,亦即摄像头之间的校准设备的视觉处理器执行,无需主机平台进行计算。

尽管摄像头的设计是为了在使用周期内保持这种校准,但有些因素可能会导致校准质量随着时间的推移而减损,例如暴露在极端温度变化、过度冲击或振动之上。这可能导致两种不同的畸变:传感器所附载的加固元件出现弯曲而造成的外部畸变;以及传感器透镜位置的位移而引起的内部畸变。
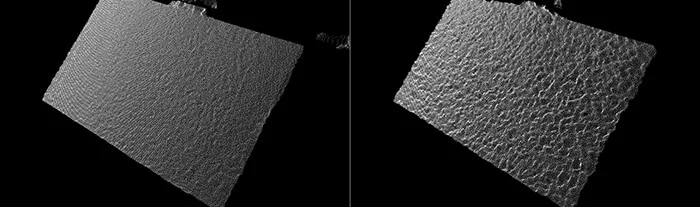
上图是平面纹理墙壁的点云比较,左边是校准的摄像头;右边则是质量减损的摄像头。
英特尔实感全新的片上校准功能支持你对系统进行精确的健康检查,从而确保传感器能够在最佳范围内工作。相关数字是设备校准运行状况的完整指示,并可随时间进行跟踪。自校准功能同时支持你以最快0.6秒的速度执行重新校准。摄像头深度可以在不到一秒的时间内恢复到近乎完美的性能。由于不需要目标、棋盘格图案墙或复杂的设置(如特定的摄像头运动路径或摄像头需要保持静态),自校准非常简单,只需调用片上功能即可。
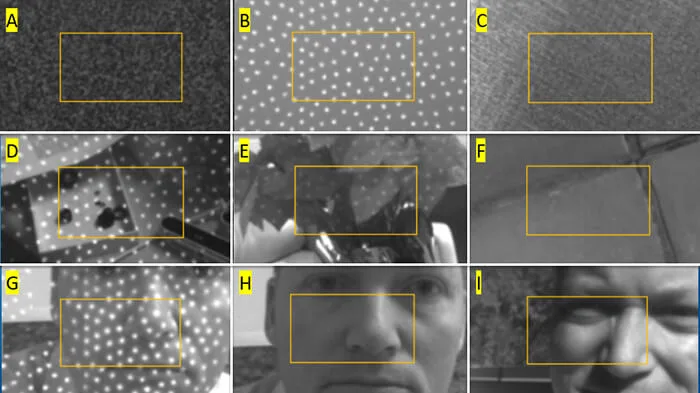
上图是已成功用于自校准的一组场景:没有投影仪照明的理想平面纹理目标(A);打开投影仪的场景(B、D、E、G);在明亮阳光下的室外场景(F、I)。
所述的功能现在都已嵌入到摄像头视觉处理器的更新固件中,无需由主机平台进行计算。如果健康检查过程确定的新校准数据优于旧数据,你可以将更新的和改进的校准数据直接烧录到闪存中,从而提高系统性能。这适用于D400系列中的所有现有设备,你只需按照Intel RealSense Documentation文档更新固件即可。