苹果最新AR专利提出『点云压缩图像填充』技术

又一份点云技术专利申请
(映维网 2020年04月08日)当一束激光照射到对象表面时,所反射的激光会携带方位和距离等信息。若将激光束按照某种轨迹进行扫描,系统可以边扫描边记录反射的激光点信息。由于扫描极为精细,我们能够获得大量的激光点,而它们可以形成激光点云。
新款iPad Pro搭载了激光雷达LiDAR扫描仪,而它显然具有促进AR体验的潜力。如同HoloLens 2或Magic Leap 1中的深度传感器一样,iPad Pro中的LiDAR扫描仪可以用作飞行时间传感器,测量从表面反射而回的光线点云。
苹果曾在一份声明中指出:“LiDAR扫描仪可测量距周围对象的距离(最远5米),可支持室内和室外,并在纳秒级的光子水平下运行。”
实际上,如果你有留意映维网的专利分享,你应该不会对苹果的点云技术感到陌生,因为这家公司已经提交过数十份相关的技术发明。
日前,美国专利商标局又公布了一份名为“Point Cloud Compression Image Padding”的点云技术专利申请。
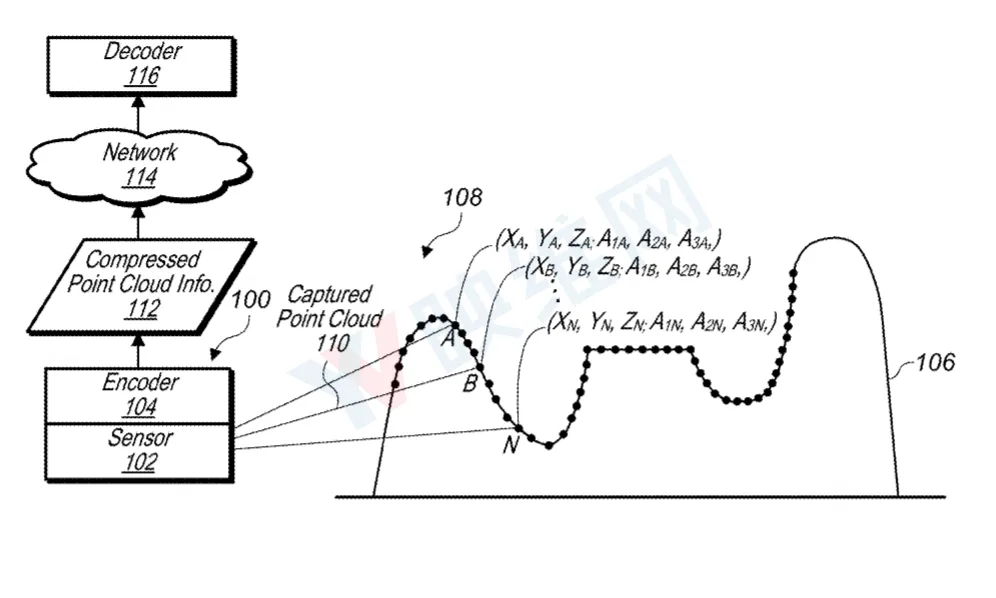
苹果在文件中主要描述了点云压缩图像填充技术。
......(全文 1138 字,剩余 780 字)











