谷歌为VR 3DoF控制器追踪优化提出『手臂模型』解决方案

查看引用和消息源请点击:映维网
同时带来更具沉浸感的游戏体验。
(映维网 2019年03月23日)今天美国专利商标局公布了一批谷歌专利申请,其中一份介绍了与VR控制器相关的新编程方法,超越了传统的三自由度模型,同时带来更具沉浸感的游戏体验。
在一些VR系统中,用户通过头显和3DoF运动控制器来与虚拟环境中的虚拟对象交互。对于所述的VR系统,用户可以使用运动控制器来与虚拟对象交互。但是,只通过基于纵摇、横摇和垂摇的三自由度追踪(只是旋转)来追踪运动控制器可能无法产生真正的沉浸体验。
例如,用户可以以各种方式倾斜和转动头部,以不同的角度来查看VR环境。但由于VR控制器有限的三自由度追踪,在头显视图内对虚拟控制器进行追踪踪可能受到限制:无法追踪物理控制器在空间中的绝对位置。
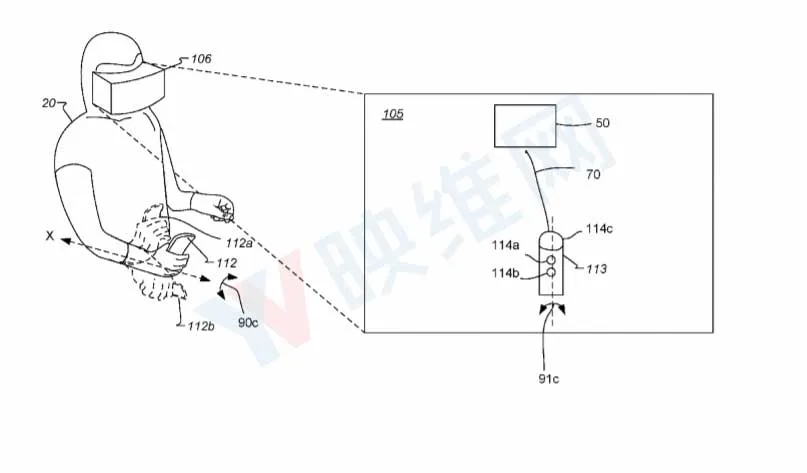
然而,VR手臂模型可以利用物理控制器的旋转追踪来创建虚拟控制器的位置和方向。谷歌在专利中指出,他们的发明技术可以在VR环境中模拟用户以一定位置值和方向值握持控制器的情形。另外,虚拟控制器在VR环境中的位置可以对应于用户握住并移动物理控制器的方式。谷歌的发明描述了追踪物理控制器的优化方式,包括定义肘关节(第一关节)和腕关节(第二关节)之间的区段。
......(全文 979 字,剩余 508 字)