Magic Leap公布卷积神经网络SLAM定位技术

文章相关引用及参考:roadtovr
两个深层卷积神经网络(CNNs)提供的追踪系统。
(映维网 2017年7月27日)估值达数十亿美元的神秘初创公司Magic Leap至今都没有向世界展示过任何设备,但在最近由Magic Leap研究人员发表的题为《Toward Geometric Deep SLAM》的论文中,我们睹见了一种创新的机器视觉技术,其旨在帮助创建一款强大的独立AR头显。

论文的作者是Magic Leap研究人员Daniel DeTone、Tomasz Malisiewicz和Andrew Rabinovich,其描述了由两个深层卷积神经网络(CNNs)提供的追踪系统,一种用于图像处理的人造“大脑”。这两个深层卷积网络被称为“MagicPoint”和“MagicWarp”,而研究人员称两者可实现一个“快速,精简,轻松地在单个CPU上运行30+ FPS”的系统。
根据论文,MagicPoint对单个图像进行操作,并创建对追踪十分重要的2D点,而这部分描点将服务于即时定位与地图构建(SLAM)视觉算法。在把他们的网络与经典的点检测器进行比较时,Magic Leap团队发现“图像噪声上存在显着的性能差距”。
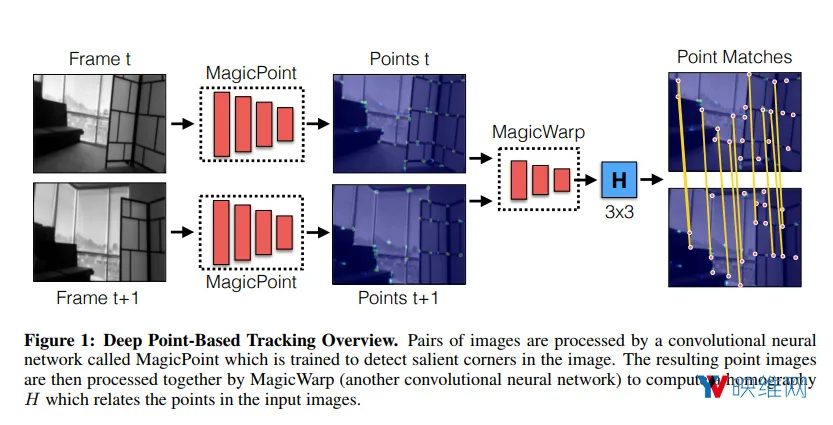
由于计算移动物体形状并不是一件容易的事情(可能是物体或观察者移动),所以MagicWarp的作用就是在建模周围世界的同时,使用包含由MagicPoint生成的2D点的图像来预测运动。MagicWarp SLAM算法与传统方式不同,因为它仅使用点的位置,而不是更复杂的“Local Point Descriptors(本地点描述子)”(这是用于描述包含编码的唯一标识信息的计算机视觉术语)。
在通过物理和合成数据进行测试后,Magic Leap表示两个卷积神经网络能够实时运行。论文作者总结说:“我们认为,大规模部署由深度学习驱动的SLAM系统的日子并不遥远。”
虽然我们并不清楚Magic Leap是否已经准备好一款可以公开展示的光场显示头显原型,或者是其执行总监罗尼·阿伯维茨所描述的“小巧,便携,强大而且很酷”的产品,但经过3年以上的等待之后,映维网渴望了解关于Magic Leap的任何信息。当然,这不包括任何后期制作,不符合事实的营销活动。
相关论文:Toward Geometric Deep SLAM
......(全文 632 字,剩余 0 字)











