美国研究人员通过VR训练机器人拾取物体

未授权禁止转载本文到微信公众号,文章相关引用及参考:digitaltrends
美国加州大学伯克利分校的研究人员正通过虚拟现实来训练机器人拾取物体。
(映维网 2017年5月31日)我们的双手擅于拾取各种各样的物体,而我们的大脑则可为其提供最佳的方式和切入点。然而,这对机器人而言并不容易。在面对现实生活中千千万万种形状不同的物体,机器人难以根据特定的物体采用专门的抓取方式。
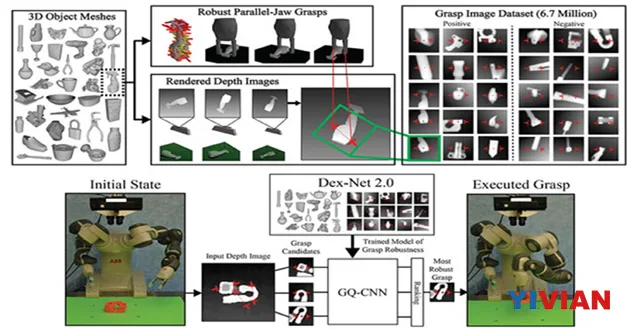
为此,美国加州大学伯克利分校的研究人员开发了一个名为DexNet 2.0的系统。借助深度学习神经网络,这个系统能够在虚拟现实中分析物体,而不是通过在现实场景中无数次的练习。
负责这一项目的博士后研究员杰夫·马勒(Jeff Mahler)表示:“我们构建了基于抓取物理学的概率模型,而不是假设机器人明白世界的真实状态。具体来说,我们根据对环境的观察来为硬度或成功抓取的概率进行建模。我们使用了1500个虚拟3D模型来生成670万个合成点云和抓取。然后我们通过深度学习对特定点云进行抓取成功的概率预测。深度学习允许我们通过大型而复杂的数据集来学习这种映射。”
DexNet最为明显的应用是改进用于仓库或生产车间的机器人,使其能够处理新元件或其他对象,并且将它们包装在箱子中或执行组装。但马勒指出,这种技术同时可以帮助提升家庭机器人的性能,比如清理物品或帮助老年人拾取物品的机器人。
但研究人员还有很多工作要做。马勒表示:“明年研究的主要重点是让机器人掌握针对特定用例的抓取。例如,竖直摆放一个瓶子,或是翻转瓶子并将其插入至砖块之中。”
其他用例包括在一堆混乱的物体中抓取对象,或重新定向物体以进行组装。研究团队计划在2017年晚些时候开源必要的代码,让用户可以生成自己的训练数据集,并把系统应用在他们自己研发的机器人身上。
马勒解释说:“我们对商业化存在一定的兴趣,但我们在未来6-12个月的时间里对进一步的研究更感兴趣。”
值得一提的是,OpenAI的研究员同样在利用虚拟现实来训练机器人。他们在博文中介绍,只需在虚拟现实中记录一次动作,包含两个AI算法的系统就能够指示物理设备来解码和复制动作。







