日本EXOS机械手追求粗粒度触觉反馈

本文相关引用及参考:roadtovr
不像Dexmo,EXOS追求简单,是一种粗粒度的解决方案。
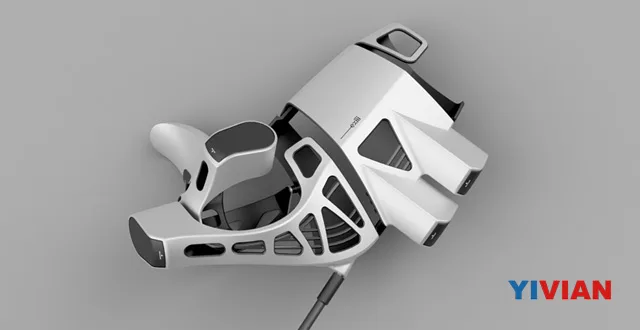
(映维网 2017年1月28日)日本开发商Exiii在研发一款叫做EXOS的支持触觉反馈的VR手套,采用力反馈来实现沉浸式坏境内的物理感知——对你的动作提供反作用力,让你真实地感受到虚拟物体。
相信一些读者还记得映维网曾经报道的来自Dexta Robotic的Dexmo触觉反馈解决方案。相比而言,EXOS的愿景可能并没有那么宏伟,但确实是一种有趣的解决方案。

不像Dexmo,EXOS追求简单,是一种粗粒度的解决方案。Dexmo提供增量阻力以及五个手指的独立跟踪(五指手套),而EXOS提供大拇指的独立跟踪及其他四个手指的共同跟踪(两指手套)。

上图:Dexmo
相对于Dexmo的解决方案,EXOS的方案似乎有点倒退。但EXOS很可能是一种非常明智的方案,通过减少复杂度,牺牲保真度,在不需要太多的运动的需求中实现更稳定的解决方案。当然,映维网仅仅是猜测而已,毕竟我们也还没真实体验过。