Lighthouse追踪系统到底有多准确

(映维网 2016年7月18日)Valve的“Lighthouse”追踪系统为HTC Vive头显和控制器带来的房间尺度追踪空间。但这个系统到底有多准确呢?Oliver Kreylos是加州大学戴维斯分校的一名虚拟现实研究员,他对这个系统进行了深入的分析,希望让我们更好的了解这个系统。
Oliver Kreylos拥有计算机科学博士学位,在虚拟现实数据可视化研究中已经耕耘多年。他开发了属于自己的虚拟现实软件,名为VRUI。这个软件可以帮助他可视化、操纵、并且分析各个系统中的虚拟现实数据。之前,他一直使用像CAVES这样的企业级虚拟现实系统,但现在Kreylos开始探索最近兴起的消费级虚拟现实硬件,并分析这些硬件适不适合他目前的工作。
为此,他在他的博客上传了一个详细的Lighthouse追踪系统的分析,其中包括这个系统的准确度,而这也是为什么映维网今天可以为大家带来这篇文章的原因。如果你对Lighthouse追踪技术有兴趣的话,那么映维网强烈建议大家登陆Oliver Kreylos的博客,浏览整篇文章(点击查看)。如果大家只是对分析结果感兴趣的话,那么就请听我细细道来。
◐ 更多的基站意味着更加准确的追踪
基站是Lighthouse追踪系统的基础,它会使用交替扫描的横向和纵向激光来检测HTC Vive头显和SteamVR控制器,而头显和控制器里面的小型传感器同时会检测经过的激光。然后系统会智能地把所有的数据结合起来,从而识别出设备的转动,以及在3D空间中的位置。每个设备所装载的高速IMU(惯性测量单位)也会协助定位追踪的进行。
Kreylos试图测量系统的“抖动误差”,也就是完全静止站立的测量物体(这里指头显)在测量时所产生的误差。随着时间的推移,通过3D空间里面的追踪系统在每个位置中所提供的读数,他可以测量每个轴上读数的量。
在两个基站追踪Vive头显的情况下, Kreylos发现系统的抖动误差大概为0.3mm,这意味着对于追踪系统来说,头显似乎在所有的方向下都会有0.3mm的抖动(尽管在现实中,头显是完全静止不动的)。
不过幸运的是,这个亚毫米级误差是如此的小,当我们戴着头显的时候,大脑是感知不到的。
有趣的是,Kreylos当只使用一个基站的时候,抖动误差仍然为0.3mm,而当轴指向另个基站的时候,误差会达到2.1mm。也就是说,当被两个基站同时检测到的时候,Lighthouse可以非常准确的追踪物体。
◐ 精确度和准确度
Kreylos同时测量Lighthouse的精确度和准确度。他解释说,精确度测量是指:“在空间中对同一个点多次测量的结果会有多接近”;而对于准确度,是指:“在空间中对一个点的测量和那个点的真实位置会有多接近”。
正如所有靠谱的科学家一样,他首先解释了测量的方法:
我把一个36英寸的尺子放在地板上,位于追踪空间的中心,然后用我附在其中一个追踪控制器的小型探针针尖来标识出每1英寸的3D位置(位于控制器的本地坐标系的探针针尖位置,是对点进行重复测量的关键,这是源于一个简单的校准程序)。接下来,我把每个三维点的测量结果与“理想”的三维点进行比较。这个理想的三维点是通过非线性点集的对准算法(non-linear point set alignment algorithm)在一些任意坐标系中生成每一个点的理论位置。
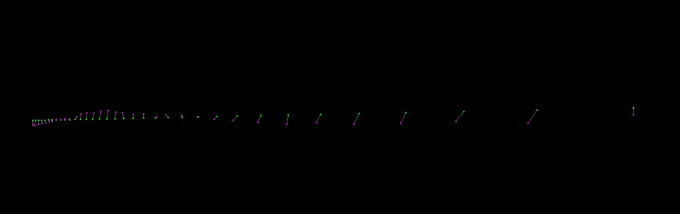
绿色代表着理想的三维点,而紫色则为Lighthouse追踪所测量的三维点。图片由 Oliver Kreylos提供。
根据这些测量,Kreylos预计,Lighthouse的精确度为RMS(均方根)1.5mm;准确度为RMS1.9mm.
尽管上图中两种颜色的点并不是完全对齐的,但Kreylos表示“(Lighthouse)整体的准确度非常好”。他并进一步推断,作为一个有实际意义的结果,因此,附加一个校准探针针尖的Lighthouse控制器,有可能作为一个大面积三维数字化仪来使用,预期精度约为2mm。
◐ 漂移校正
Kreylos同时检查并解释了,当激光扫描每个轴的时候,控制器的IMU(惯性测量单位)是如何被Lighthouse系统校正的。
通过让控制器围绕着头部进行高速转动,并绘制测量数据,Kreylos可以可视化这个漂移校正。
引用参考:Source







