加州大学触觉手套可为多指提供二维方向力反馈

可为多指提供二维方向力反馈
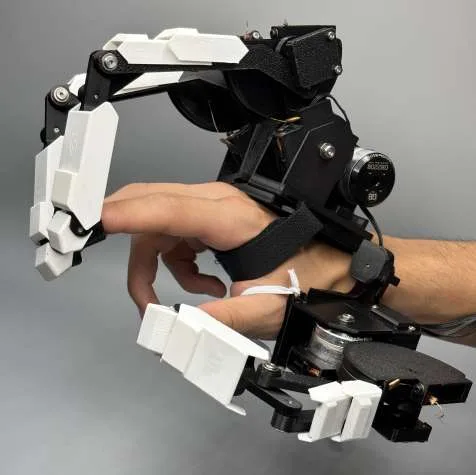
(映维网Nweon 2026年06月29日)加州大学圣地亚哥分校研究团队日前介绍了一款名为N2D Haptic Glove的可穿戴触觉设备。设备据称是首款能够为多个手指同时提供平面(二维)方向力反馈的轻量化装置,可提升虚拟现实训练及模仿学习等场景下的操作精度与真实感。
在虚拟交互领域,操作员常依赖视觉判断接触力,缺乏方向触觉容易导致误判、过度施力或控制不稳。现有多数触觉手套仅提供振动或单一方向的阻力反馈,难以传递如戳、推、滑等动作中的轴向与横向力信息。N2D手套通过在手指连杆系统中集成绞盘驱动与无刷电机,将计算出的接触力转化为指尖可感知的平面方向力,从而帮助操作员更准确地感知与控制接触力。
手套目前覆盖拇指、食指和中指,每个手指配备两个主动自由度,通过电机驱动连杆在指尖产生平面内的推拉力。连杆结构保留了手指自然屈伸及内收外展的关节活动范围,并将电机固定在手背基座,避免额外惯性干扰。整体重量约562克,控制部分采用Teensy 4.1微控制器与磁场定向控制技术,力指令通过 ROS 系统与外部机械臂实时交互。
团队进行了多项验证。在力跟踪测试中,手套对圆形力轨迹的跟踪误差均值约为0.032N(x 方向)和0.014N(z 方向),方向误差约2.81度,表明其能较准确地呈现平面力方向。
用户研究共招募多名志愿者,通过遥操作Franka机械臂和灵巧手向数字秤按压至目标重量,比较三种反馈模式:无触觉、一维阻力反馈和二维平面反馈。在轴向按压(指尖触按)任务中,二维反馈显著降低了绝对力误差。例如,在100g目标下,中位误差从纯视觉模式的50.25g降至二维反馈的21.20g(p=1.43×10⁻⁵);在50g任务中同样有改善趋势。在横向按压任务中,有触觉反馈(一维或二维)均优于纯视觉,但一维与二维之间未观察到显著差异。
主观评估(NASA-TLX)显示,使用二维反馈时参与者报告更低脑力负担和更高表现满意度,但也反映手套重量对体力负担有一定影响。
需要注意的是,团队指出,当前设计仅支持三指,若扩展到五指重量预计增至约780克,长期佩戴可能疲劳。另外,低力输出区存在电机死区,影响极精细任务。不过,未来电机小型化和材料优化有望改善。研究人员表示,所述手套计划用于手术遥操作、虚拟训练及模仿学习等方向。