从不可知到透明化:AR界面可帮助人类预判机器人的每一步

查看引用/信息源请点击:techxplore
机器人正逐步进入工作场所、医院、仓库和公共空间
(映维网Nweon 2026年06月12日)随着机器人逐步进入工作场所、医院、仓库和公共空间,一个简单的挑战正变得日益重要:帮助人类理解它们想做什么。
美国鲍林格林州立大学与纽约大学坦登工程学院的研究人员开展的一项全新研究表明,增强现实可以提供一种有效解决方案。通过将机器人的目标、规划路径和安全区域叠加到现实世界视图中,人们预判机器人行为和识别潜在危险的能力显著提升。
尽管机器人自主性越来越强,但其决策过程对附近的人类而言往往不透明。这种不确定性可能引发困惑、降低信任,并在某些情况下危及安全。
研究人员表示:“人机协作的最大挑战之一,是帮助人们在机器人行动前理解其意图。当用户能看到机器人的规划路径、目的地和安全边界时,他们就能更好地预判其动作,并为自己如何移动做出明智决策。”
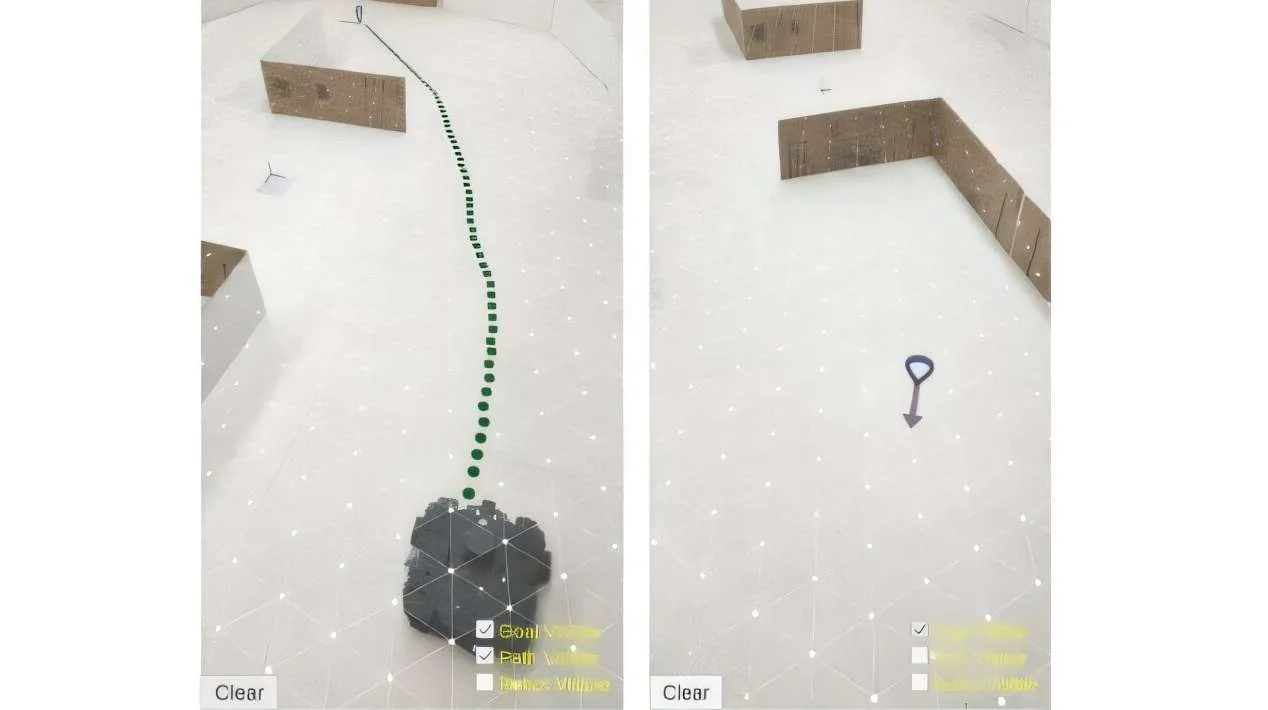
为解决这一问题,研究人员开发了一款可实时传达移动机器人意图,将数字信息世界叠加到用户现实世界视图中的AR应用。
它主要提供三类视觉信息:一种模式以虚拟位置图钉显示机器人目的地;另一种展示机器人计划遵循的路线;第三种则呈现机器人的数字孪生在环境中移动,并附带一个视觉缓冲区域,标示可能发生碰撞或干扰的区域。
为检验该系统是否确实提升理解力,研究人员招募了58名具有不同机器人与增强现实经验水平的参与者。参与者观看一系列展示机器人导航任务的AR场景,随后回答旨在衡量人因研究人员所称“态势感知”能力的问题,即感知、理解并预判环境中即将发生事件的能力。
被试需要识别机器人的目标、识别障碍物、判断物体是否会干扰机器人移动,并预测环境中的哪些区域对人类是安全的。
在所有任务中,参与者的平均态势感知得分达到86.5%。他们在识别障碍物和寻找避免干扰机器人操作的安全区域方面表现尤为出色。
同样重要的是,参与者表示对与机器人协作更有信心。超过96%的人认为,AR界面提升了他们对机器人意图的理解,并增强了预判机器人行为的信心。
团队表示:“这种增强的理解力,是建立人类与自主系统之间信任、安全与高效协作的重要基础。”
通过可视化机器人意图,或许有助于弥合人机协作中最持久的鸿沟之一。随着自主系统在日常生活中愈发普及,一个窥见机器人计划的数字窗口,或能让人们在与它们并肩工作时变得更加安心自如。
......(全文 882 字,剩余 0 字)








