谷歌提出 AR/VR 设备 IMU 温度偏差补偿与空闲校准方法

基于温度自适应的IMU偏差补偿与空闲状态校准方法
(映维网Nweon 2026年02月02日)AR/VR等设备中惯性测量单元存在因温度变化导致的测量偏差问题。所以,谷歌在一份专利申请中提出,可以在设备空闲时通过建模与动态校准来补偿偏差。通过实时温度监测和自适应模型更新,可以提升追踪的精度与稳定性,同时避免了用户使用时的干扰。
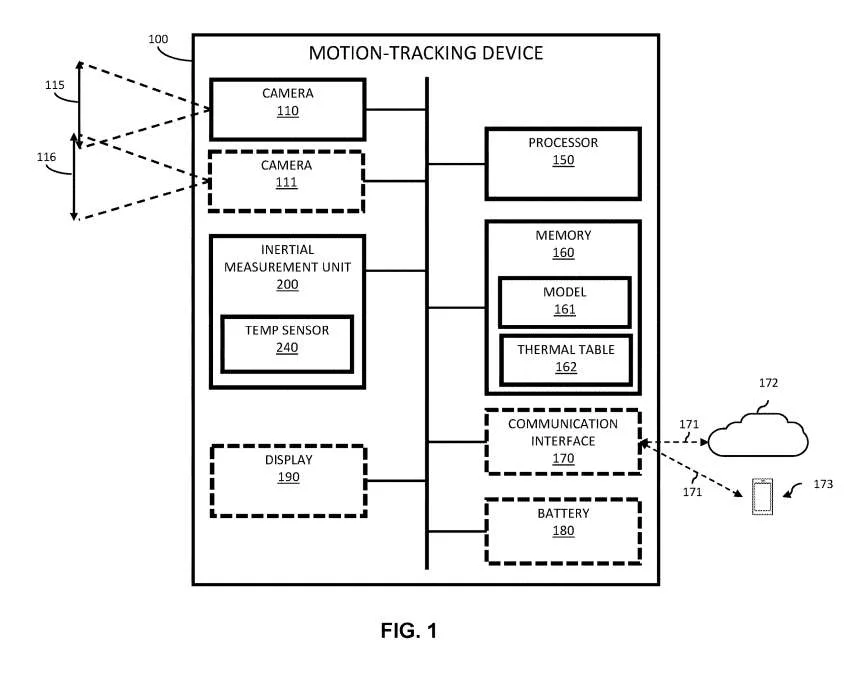
图1是设备框图。设备100包括配置为捕捉视场(例如第一视场115)图像的摄像头(例如第一摄像头110)。设备同时可以包括处理器150,来自第一摄像头110的图像可以由处理器进行分析,以识别图像中用于运动追踪的一个或多个特征。在连续图像中追踪一个或多个特征的像素位置可能有助于确定设备100的运动。
例如,摄像头110可以配置为在一段时间内采集多张图像。设备的处理器150可以配置为分析这些图像,以确定设备是静止/移动和/或设备已静止/移动了多长时间。在一个实施例中,当在一段时间内(例如,超过阈值时间段)未在图像中检测到运动时,可以检测到设备100的空闲状态(即静止状态)。
......(全文 4709 字,剩余 4327 字)