研究人员展示基于皮肤拉伸模拟物理力的VR触觉设备

研究人员展示基于皮肤拉伸模拟物理力的VR触觉设备
(映维网Nweon 2025年12月09日)日前,有研究人员展示了一款用于前臂的原型设备,它通过皮肤拉伸在手部追踪的VR应用中模拟物理力。
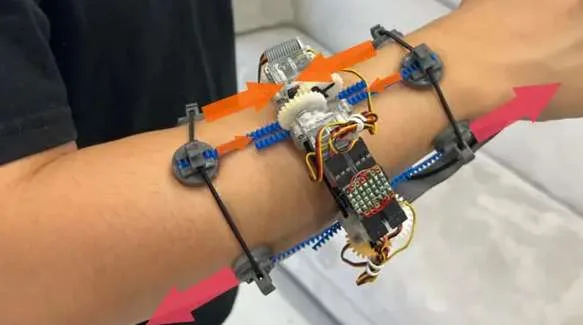
名为QuadStretcher的设备旨在让虚拟现实中的物理反馈变得可感知。其特别之处在于:它既不需要手套,又不需要控制器,而是通过在前臂上进行有针对性的皮肤拉伸来工作。
系统不是直接刺激手部,而是利用四个电动拉伸单元产生差异化的力量感。前臂的每一侧都有一个拉伸元件,通过齿轮齿条系统纵向拉动或推动皮肤,位移可达11毫米。该系统以前臂肌肉的自然运动为模型,使得刺激特别直观。
在一项针对20名测试对象的研究中,QuadStretcher与一款Tasbi仿制品(一种通过压力脉冲提供反馈的触觉臂带)进行了比较。研究人员评估了六种虚拟场景下的感受,从简单的动作(如按下按钮)到更复杂的动作(如拉伸橡皮筋或挥动网球拍)。
在简单动作中,几乎感觉不到任何差异,但在更动态的应用中,QuadStretcher表现出色。系统的表现更好,尤其是在感知作用力的方向方面。许多测试者描述说,在拉动虚拟带子时能感觉到张力,就好像真的有东西在抵抗一样。相比之下,挤压式臂带的压力感觉是均匀的,与情境的关联性较弱。
另一个方面是:反馈的位置影响了体验。QuadStretcher戴在前臂上,挤压式臂带戴在手腕上。对于像网球挥拍这样的大幅度手臂动作,前臂的拉伸感觉更自然。然而,对于更精细的手部动作,手腕上的压力通常更合适。
对于动作应该如何感觉的主观认知也起到了作用。一些测试者将激活喷雾瓶的动作更多归因于整个手臂的运动,而另一些人则将其视为简单的手指动作。因此,触觉系统的开发者不仅应该关注技术,还应该关注用户的期望。
QuadStretcher已在GitHub作为开源项目提供,后续项目已在开发中。除了更紧凑的设计之外,该系统未来还将能够模拟冲击力。







