芬兰坦佩雷大学开发VR遥操作框架控制超人体尺度重型机械臂

VR+机器人
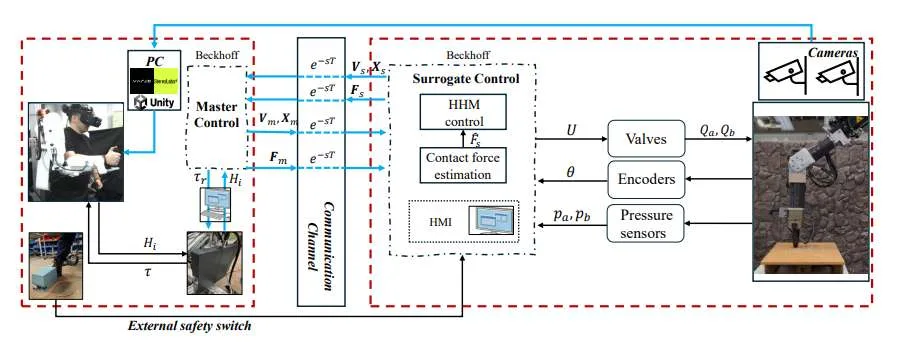
(映维网Nweon 2025年09月12日)在诸如遥操作等人在回路系统中,特别是涉及重型机械臂的系统,要实现高任务性能,既需要鲁棒的控制,也需要操作员的高度投入。在一项研究中,芬兰坦佩雷大学团队提出了一种适用于超人体尺度机器人系统的双向遥操作框架,并通过沉浸式虚拟现实界面和分布式触觉反馈,增强了系统的透明度以及操作员的临场具身感,特别是能动感和自我位置感。
为支持这种具身感并实现高水平的运动和力透明度,研究人员开发了一种无需力传感器的鲁棒控制架构,所述架构解决了输入非线性、主-从端不对称性、未知不确定性和任意时间延迟等问题。控制回路中集成了人-机器人增强动力学模型,以提高控制器的适应人的能力。
理论分析证实了闭环系统的半全局一致终值有界性,保证了其对现实世界不确定性的鲁棒性。大量的真实世界实验证明了在高达 1:13 的运动缩放比和 1:1000 的力缩放比下仍能实现高精度追踪,突显了结果的重要性。另外,研究确立了在高达 150 毫秒的单向固定和时变通信延迟下,运动追踪与力反射和跟踪之间的稳定性-透明度权衡关系。包含 10 名参与者(9 男 1 女)的用户研究结果表明,系统能带来良好的临场具身感(76.4%),同时非常用户友好且无性别限制。考虑到重型机械臂的规模和重量,这些结果意义重大。
......(全文 3566 字,剩余 3084 字)











