日本电气通信大学开发TeleTouch系统实现远程触觉传输

在远程位置之间实现人与人之间的触觉传输
(映维网Nweon 2025年09月02日)在一项研究中,日本电气通信大学团队介绍了一种名为TeleTouch的系统。所述系统能够在远程位置之间实现人与人之间的触觉传输。 TeleTouch利用人类触觉与生俱来的灵活性和敏感性,促进自然直观的远程交互。
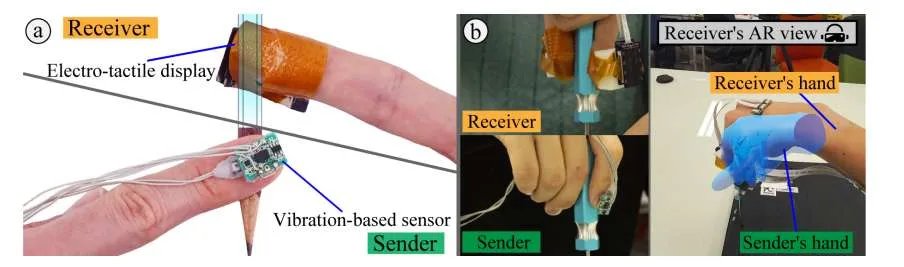
它含两个主要组成部分: 一种不覆盖指尖的基于振动的触觉传感器,以及一种能够复现人类指尖感知空间分辨率的高分辨率电触觉显示器。另外,集成增强现实头戴式显示器能够实时共享手部运动和位置的视觉信息,从而增强情境感知并促进协调的触觉交互。
据介绍,所述项目旨在通过在远程人类操作者之间传输触觉信息来实现远程操作(图 d1)。在大多数远程操作场景中,机器人部署在真实的工作环境中,环境数据(包括触觉信息)被捕获并作为感官反馈传递给远程操作者。
......(全文 1272 字,剩余 954 字)








